

【導(dǎo)讀】激光測(cè)距傳感器是先由激光二極管對(duì)準(zhǔn)目標(biāo)發(fā)射激光脈沖,經(jīng)目標(biāo)反射后激光向各方向散射。部分散射光返回到傳感器接收器,被光學(xué)系統(tǒng)接收后成像到雪崩光電二極管上。雪崩光電二極管是一種內(nèi)部具有放大功能的光學(xué)傳感器,因此它能檢測(cè)極其微弱的光信號(hào)。記錄并處理從光脈沖發(fā)出到返回被接收所經(jīng)歷的時(shí)間,即可測(cè)定目標(biāo)距離。

激光傳感器必須極其精確地測(cè)定傳輸時(shí)間,因?yàn)楣馑偬?。要分辨?ps的時(shí)間,這是對(duì)電子技術(shù)提出的過(guò)高要求,實(shí)現(xiàn)起來(lái)造價(jià)太高。但是如今的激光傳感器巧妙地避開(kāi)了這一障礙,利用一種簡(jiǎn)單的統(tǒng)計(jì)學(xué)原理,即平均法則實(shí)現(xiàn)了1mm的分辨率,并且能保證響應(yīng)速度。
遠(yuǎn)距離激光測(cè)距儀在工作時(shí)向目標(biāo)射出一束很細(xì)的激光,由光電元件接收目標(biāo)反射的激光束,計(jì)時(shí)器測(cè)定激光束從發(fā)射到接收的時(shí)間,計(jì)算出從觀測(cè)者到目標(biāo)的距離;LED白光測(cè)速儀成像在儀表內(nèi)部集成電路芯片CCD上,CCD芯片性能穩(wěn)定,工作壽命長(zhǎng),且基本不受工作環(huán)境和溫度的影響。因此,LED白光測(cè)速儀測(cè)量精度有保證,性能穩(wěn)定可靠。

激光測(cè)距傳感器的應(yīng)用
汽車(chē)防撞探測(cè)器:一般來(lái)說(shuō),大多數(shù)現(xiàn)有汽車(chē)碰撞預(yù)防系統(tǒng)的激光測(cè)距傳感器使用激光光束以不接觸方式用于識(shí)別汽車(chē)在前或者在后形勢(shì)的目標(biāo)汽車(chē)之間的距離,當(dāng)汽車(chē)間距小于預(yù)定安全距離時(shí),汽車(chē)防碰撞系統(tǒng)對(duì)汽車(chē)進(jìn)行緊急剎車(chē),或者對(duì)司機(jī)發(fā)出報(bào)警,或者綜合目標(biāo)汽車(chē)速度、車(chē)距、汽車(chē)制動(dòng)距離、響應(yīng)時(shí)間等對(duì)汽車(chē)行駛進(jìn)行即時(shí)的判斷和響應(yīng),可以大量的減少行車(chē)事故。在高速公路上使用,其優(yōu)點(diǎn)更加明顯。
車(chē)流量監(jiān)控:使用方式一般固定到高速或者重要路口的龍門(mén)架上,激光發(fā)射和接收垂直地面向下,對(duì)準(zhǔn)一條車(chē)道的中間位置,當(dāng)有車(chē)輛通行時(shí),激光測(cè)距傳感器能實(shí)時(shí)輸出所測(cè)得的距離值的相對(duì)改變值,進(jìn)而描繪出所測(cè)車(chē)的輪廓。這種測(cè)量方式一般使用測(cè)距范圍小于30米即可,且要求激光測(cè)距速率比較高,一般要求能達(dá)到100赫茲就可以了。這對(duì)于在重要路段監(jiān)控可以達(dá)到很好的效果,能夠區(qū)分各種車(chē)型,對(duì)車(chē)身高度掃描的采樣率可以達(dá)到10厘米一個(gè)點(diǎn)(在40Km/h時(shí),采樣率為11厘米一個(gè)點(diǎn))。對(duì)車(chē)流限高,限長(zhǎng),車(chē)輛分型等都能實(shí)時(shí)分辨,并能快速輸出結(jié)果。

無(wú)人機(jī):著機(jī)器人(Robot)、無(wú)人機(jī)(Drone)、無(wú)人搬運(yùn)車(chē)、自動(dòng)駕駛等新概念系統(tǒng)的興起,連帶刺激測(cè)距與避障(Obstacle Avoidance)技術(shù)需求。其中測(cè)距為避障的基礎(chǔ),并有多種技術(shù)可以實(shí)現(xiàn)測(cè)距,包含無(wú)線射頻(Radio Frequency;RF)、超音波(Ultrasonic)、紅外線(Infrared)以及激光/雷射(Laser)等。這些技術(shù)各有其優(yōu)缺點(diǎn),且成本也有差異性。
其中,紅外線與激光屬光電半導(dǎo)體技術(shù),分別運(yùn)用紅外線二極管(Infrared Light-Emitting Diode;IR LED)及激光二極管(Laser Diode;LD)的發(fā)波,而后接收回波來(lái)辨識(shí)物體的距離,紅外線技術(shù)適合短距離運(yùn)用,激光技術(shù)則適合長(zhǎng)距離范疇。另外,常見(jiàn)的避障技術(shù)還有無(wú)線射頻、超音波技術(shù)等,它們則常見(jiàn)于汽車(chē)領(lǐng)域應(yīng)用。
激光雷達(dá)傳感器
激光雷達(dá)是汽車(chē)領(lǐng)域相對(duì)較新的應(yīng)用系統(tǒng),但正愈來(lái)愈引起人們的注意。系統(tǒng)和半導(dǎo)體供應(yīng)商們正專(zhuān)注于研發(fā)和改進(jìn)新的解決方案,并計(jì)劃2020/2021年將樣件應(yīng)用起來(lái)。
什么是LIDAR(激光雷達(dá))?如前所說(shuō),它是利用激光進(jìn)行探測(cè)和測(cè)距技術(shù)的簡(jiǎn)稱(chēng)。除了需要激光發(fā)射器,這一系統(tǒng)還需要有一個(gè)高精度的接收器。由于能通過(guò)獨(dú)特的方法提供被探測(cè)物體的三維影像,激光雷達(dá)主要被用于測(cè)量與固定或移動(dòng)物體間的距離。
如今,任何買(mǎi)了激光測(cè)距儀的人都在用這種方法在家中、建筑材料商店等地方測(cè)量距離,其能測(cè)量的距離可達(dá)數(shù)米。而對(duì)于駕駛員輔助系統(tǒng),關(guān)鍵挑戰(zhàn)則在于保證系統(tǒng)在任何環(huán)境狀況下(溫度變化、陽(yáng)光照射、黑暗中或雨雪天氣)都能正常工作,而且還要能辨認(rèn)出300米以外的物體。當(dāng)然,還需要能夠體積最小,可以在最低的成本下大規(guī)模生產(chǎn)。
激光雷達(dá)系統(tǒng)不是新興事物,也已經(jīng)在工業(yè)和軍事方面應(yīng)用了很多年。但是,我們這里所說(shuō)的是復(fù)雜的機(jī)械透鏡系統(tǒng),還要帶有360度無(wú)死角視線,能捕捉到物體的空間三維影像。如果還像工業(yè)和軍事上那樣售價(jià)成千上萬(wàn)美元,那么將不可能被大規(guī)模運(yùn)用在汽車(chē)領(lǐng)域。
如今,激光雷達(dá)系統(tǒng)有2個(gè)主要發(fā)展方向,紅外激光雷達(dá)系統(tǒng)加上微電機(jī)械系統(tǒng)(MEMS Micro-Electro-Mechanical System)(配上轉(zhuǎn)動(dòng)的激光發(fā)射器),或者采用固定狀態(tài)的激光雷達(dá)系統(tǒng)。
在簡(jiǎn)要地討論這些技術(shù)的區(qū)別以前,需要對(duì)接收系統(tǒng)解釋一下。
接收系統(tǒng)的主要功能是識(shí)別從發(fā)射器發(fā)出的和從物體上反射的光束。因此探測(cè)器需要非常靈敏,以至能夠探測(cè)到單個(gè)的光子。如今,最新的相關(guān)設(shè)備采用了SPAD(Single-Photon Avalanche Diode單光子雪崩二極管) 技術(shù)。
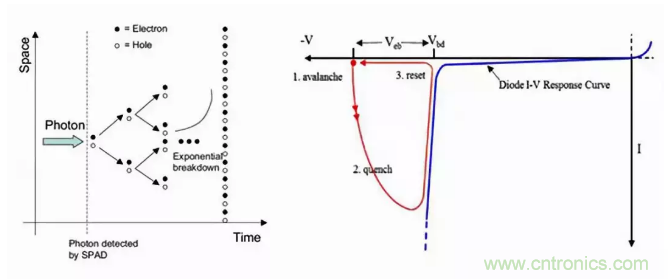
圖:SPAD 傳感器單元的原理
該技術(shù)的原理很簡(jiǎn)單,如圖11所示。這個(gè)二極管有特殊的偏移PN結(jié)結(jié)構(gòu),所以單個(gè)的光子就能在二極管內(nèi)造成雪崩電流(由一點(diǎn)小電流引發(fā)的大量電流,類(lèi)似雪崩現(xiàn)象,故名)。快速增大的二極管電流會(huì)被相應(yīng)的電路探測(cè)到,然后產(chǎn)生數(shù)字信號(hào),用于后期處理。
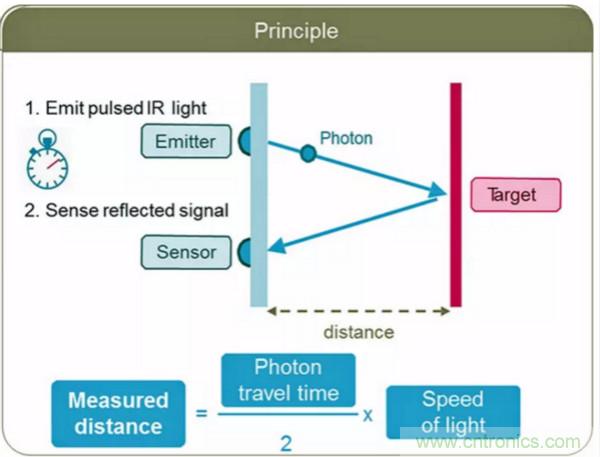
圖:激光雷達(dá)測(cè)距原理
圖12顯示的是采用SPAD傳感器測(cè)量距離的工作原理。在時(shí)間為X時(shí),激光發(fā)射器發(fā)出一個(gè)脈沖光信號(hào),這一信號(hào)會(huì)被物體反射回來(lái),經(jīng)過(guò)Y時(shí)間后一個(gè)(或更多)光子到達(dá)傳感器,到該物體間的距離可以從光線傳播的時(shí)間長(zhǎng)短計(jì)算出來(lái)。
如果一束或多束光線從轉(zhuǎn)動(dòng)的鏡面或微型機(jī)械系統(tǒng)中發(fā)射出來(lái),而又有一個(gè)由數(shù)個(gè)傳感器元件組成的陣列,那么三維立體的物體也能被探測(cè)出來(lái)。圖13和14就展示了兩種基本的激光探測(cè)系統(tǒng)的測(cè)量過(guò)程。
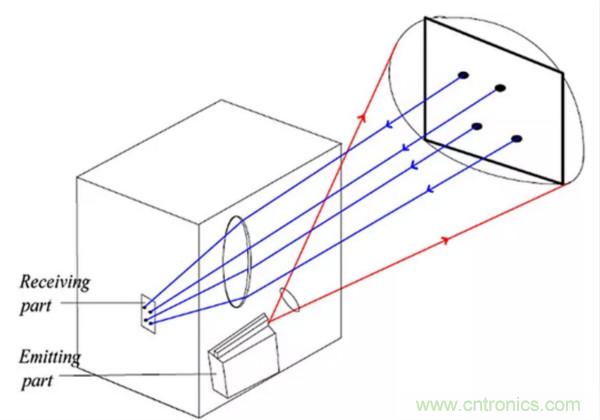
圖:固態(tài)激光雷達(dá)測(cè)距原理
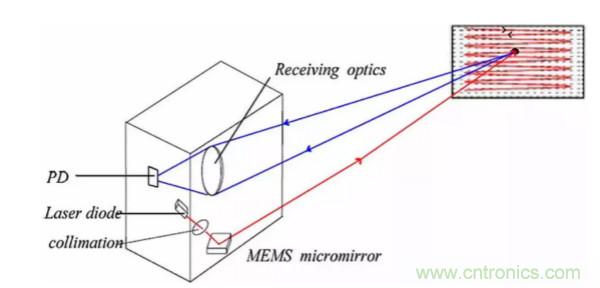
圖:基于MEMS的激光雷達(dá)測(cè)距原理
當(dāng)采用基于MEMS技術(shù)的微型鏡面系統(tǒng)時(shí),單一束的激光信號(hào)會(huì)以線形形式被發(fā)散和反射回來(lái),反射的光子被相對(duì)應(yīng)的SPAD元件中的光敏傳感器檢測(cè)到。這對(duì)于鏡面系統(tǒng)準(zhǔn)確性、工作壽命、可調(diào)節(jié)度和可靠性有非常高的要求。畢竟這是一個(gè)內(nèi)部帶有可動(dòng)部件的系統(tǒng)。
乍一看上去,一個(gè)沒(méi)有可動(dòng)零件的系統(tǒng)似乎更容易實(shí)現(xiàn)。但在這一系統(tǒng)中,需要數(shù)個(gè)(超過(guò)100個(gè))激光二極管以及一個(gè)相對(duì)較大的接收器陣列。激光二極管必須能發(fā)出脈沖寬度在毫微秒級(jí)上的、電流達(dá)數(shù)個(gè)安培的信號(hào)能力,這對(duì)半導(dǎo)體制造商是很大的挑戰(zhàn)。
兩種系統(tǒng)都還在開(kāi)發(fā)中。從一個(gè)半導(dǎo)體制造商的角度上來(lái)看,系統(tǒng)所需的半導(dǎo)體元件在技術(shù)上是可行的,但是SPAD陣列所需的空間面積不好實(shí)現(xiàn)。要想激活和控制激光二極管陣列,并實(shí)現(xiàn)大約100美元的目標(biāo)成本,則需要新的方法。相應(yīng)的微電機(jī)械系統(tǒng)也正在研發(fā)當(dāng)中。
推薦閱讀:



