

【導(dǎo)讀】本文旨在介紹我們使用ADI公司的慣性測量單元(IMU)傳感器 ADIS16470 和PNI的地磁傳感器RM3100構(gòu)建的捷聯(lián)慣性導(dǎo)航系統(tǒng)(SINS)。實現(xiàn)了基于磁力、角速率和重力(MARG)的SINS的一些基本過程,包括電磁羅盤(地磁傳感器)校準、使用擴展卡爾曼濾波器(EKF)的姿態(tài)和航向參考系統(tǒng)(AHRS)和航跡跟蹤。還實現(xiàn)了使用最小平方誤差(MSE)方法的松耦合傳感器融合技術(shù)。文章展示了每個過程步驟使用的算法和實驗設(shè)置。本文最后討論了結(jié)果分析和用于提高導(dǎo)航準確性的方法。
簡介
隨著服務(wù)機器人市場和技術(shù)的發(fā)展,導(dǎo)航已成為研究和應(yīng)用中的一個熱點。與車輛、船舶或飛機相比,服務(wù)機器人體積小,成本低,因此它們的導(dǎo)航系統(tǒng)應(yīng)該具有捷聯(lián)和低成本的特點。傳統(tǒng)的穩(wěn)定平臺導(dǎo)航系統(tǒng)通常要采用獨立的加速度計和光纖或激光陀螺儀,所有傳感器都機械且剛性地安裝在與正在移動的車輛隔離的穩(wěn)定平臺上。這導(dǎo)致了尺寸大、可靠性差、成本高的缺點。相反,在捷聯(lián)慣導(dǎo)系統(tǒng)中,慣性傳感器直接固定在車輛本體上,這意味著傳感器會與車輛一起旋轉(zhuǎn)。這種捷聯(lián)方法消除了穩(wěn)定平臺慣導(dǎo)的缺點。然而,平臺慣導(dǎo)的準確性通常高于SINS。平臺慣導(dǎo)往往可以達到戰(zhàn)略級(0.0001°/時的陀螺儀偏置,1μg的加速器偏置)或軍用級(0.005°/時的陀螺儀偏置,30μg的加速器偏置),而多數(shù)SINS只能到達導(dǎo)航級(0.01°/時的陀螺儀偏置,50μg的加速器偏置)或戰(zhàn)術(shù)級(10°/時的陀螺儀偏置,1mg的加速器偏置)。對于大多數(shù)服務(wù)機器人或AGV導(dǎo)航應(yīng)用,這一精度足夠了。
導(dǎo)航方法很多,包括機器視覺、GPS、UWB、SLAM型激光雷達等?;贗MU的慣性導(dǎo)航始終是導(dǎo)航的重要組成部分。然而,由于這種傳感器的限制——例如偏置誤差、軸間誤差、噪聲,特別是零偏不穩(wěn)定性——慣性導(dǎo)航通常需要采用一個伙伴傳感器,定期為它提供參考或校準,本文將這種情況稱為傳感器融合。許多傳感器都可以與IMU融合,例如攝像頭和里程表,但在這些傳感器中,地磁傳感器是一種低成本的方案,可與IMU配合獲得姿態(tài)信息。
在本文中,我們使用ADI的IMU ADIS16470和地磁傳感器來開發(fā)平臺和算法,實現(xiàn)捷聯(lián)慣性導(dǎo)航系統(tǒng)。但是,地磁傳感器只能提供姿態(tài)信息。對于航位推算或距離測量,我們只能使用IMU中的 加速度傳感器。
ADIS16470 IMU簡介
ADI公司的ADIS16470是一款微型MEMS IMU,集成了3軸陀螺儀和3軸加速度計。其陀螺儀零偏穩(wěn)定性為8°/時,加速計零偏穩(wěn)定性為13μg 其關(guān)鍵參數(shù)都經(jīng)過出廠校準。此外,ADIS16470的 低價格在同級產(chǎn)品中具有吸引力,得到了許多客戶的廣泛使用。在本文中,我們使用微控制器與ADIS16470通過SPI接口進行通信。
地磁傳感器介紹
地磁傳感器是用于測量羅盤體坐標(biāo)(即坐標(biāo)系)中的地磁場的傳感器,可為航向提供絕對參考。其x、y和z分量值由本地地磁場投影而來。這種傳感器有兩個主要缺點——一是精度和分辨 率不高——例如,常用的霍尼韋爾羅盤傳感器HMC5883L的分辨率僅為12位。另一個缺點是傳感器容易受到周圍環(huán)境的干擾,因為地磁場非常弱,強度范圍為毫高斯到8高斯。
盡管有這些缺點,仍然可以在許多情況下使用,例如戶外、低EMI環(huán)境等。將地磁傳感器與IMU進行松耦合,就可以在大多數(shù)環(huán)境中使用這類傳感器。
在本文中,我們使用PNI傳感器公司的高性能電子羅盤傳感器RM3100,它提供了24位分辨率。PNI使用主動激勵法來提高抗噪聲能力。
羅盤傳感器的校準
在使用羅盤傳感器之前,需要對其進行校準以消除兩個主要誤差。一個是失調(diào)誤差,這原本是由傳感器和電路的失調(diào)誤差引起的。另一個是標(biāo)度誤差。這兩種誤差都容易受到周圍磁環(huán)境的干擾。例如,如果有一個x軸向的外部磁場施加到傳感器上,就會給出外部x軸失調(diào)誤差。同時,x軸標(biāo)度也將與y軸和z軸不同。
通常用于校準磁傳感器的方法是在xy平面上轉(zhuǎn)動傳感器繞圈,然后抽取數(shù)據(jù)。一個地點的地磁場強度是一個常數(shù)值,因此繪制的數(shù)據(jù)應(yīng)該是一個圓;然而,事實上,我們將看到一個橢圓形,這意味著我們需要移動橢圓并重新縮放到以零為中心的圓。
上述2D校準方法有一些缺點,并且需要用加速器來測量其傾斜度。我們使用3D球面擬合方法來校準羅盤傳感器。首先,我們需要將傳感器旋轉(zhuǎn)到x-y-z空間中的每個方向,并在3D坐標(biāo)中繪制其值。然后我們需要使用最小平方誤差(MSE)方法將數(shù)據(jù)擬合為橢球面。
橢球方程可以表示為
其中,X、Y和Z是羅盤輸出在三個方向上的地磁分量。將這些值擬合為橢球面意味著,我們需要得到一組最優(yōu)系數(shù)解。我們將系數(shù)定義為:
在擬合時,我們定義向量:
所以我們需要計算最優(yōu)σ,并使用公式2來找出最小值:
這樣我們就可以得到圖1所示的擬合結(jié)果。

圖1. 原始羅盤數(shù)據(jù)分布(左)和使用橢球擬合后的羅盤數(shù)據(jù)(右)。
為了校準傳感器,我們需要拉伸或壓縮擬合的橢球面并將其移至以零為中心的球面上。我們使用矩陣奇異值分解(SVD)方法來進行這種校準。校準后的球體如圖2所示。1,2

圖2. 用SVD方法進行球體校準后的羅盤數(shù)據(jù)。
校準后,我們可以看到,測得的磁場強度(球半徑)幾乎恒定不變,如圖3所示。
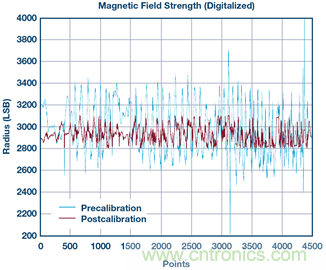
圖3. 校準前和校準后的磁場比較。
使用ADIS16470和羅盤的姿態(tài)和航向參考系統(tǒng)
AHRS由三個軸上的傳感器組成,提供姿態(tài)信息,包括橫滾角、俯仰角和偏航角。AHRS是一個來自飛機導(dǎo)航的概念。我們用它來描述方向,即姿態(tài)。
在介紹我們的方法之前,有必要首先解釋為什么確定姿態(tài)需要進行融合。事實上,我們的系統(tǒng)現(xiàn)在有三種傳感器:陀螺儀、加速器和羅盤(地磁傳感器)。
陀螺儀提供圍繞各軸的旋轉(zhuǎn)角速度。通過角速率積分計算,我們可以得到旋轉(zhuǎn)角度。如果我們知道初始航向,通過角度就始終能夠得到航向姿態(tài)。積分將累積陀螺儀的不穩(wěn)定零偏,這將導(dǎo)致角度誤差。此外,來自陀螺儀的高斯分布噪聲將積分成一個布朗運動過程,并導(dǎo)致隨機游走誤差。因此,我們很難長時 間使用陀螺儀,陀螺儀需要定期校準。
加速度計提供每個軸方向的移動加速度。在靜態(tài)狀態(tài)下,我們可以得到每個軸與重力加速度之間的角度。由于重力加速度在方向和值上恒定不變,我們可以獲得相對于重力方向的航向姿態(tài)。然而,該方法使用重力加速度作為參考,因此不能解出圍繞重力加速度旋轉(zhuǎn)的角度。
羅盤提供從地磁場投影的每個軸的值。我們可以從每個軸與恒為常數(shù)向量的地磁場方向之間的關(guān)系推導(dǎo)出角度值。如前一節(jié)所述,由于對外部磁場的抗擾性較差,羅盤需要一個低干擾的環(huán)境。
從這一解釋中,我們可以看到,很難靠一個傳感器來找到姿態(tài),我們需要組合使用兩個或三個傳感器并把信息融合起來。本文用加速度計、陀螺儀和地磁羅盤查找姿態(tài)。這種融合也被稱為磁、角速率和重力(MARG)系統(tǒng)。
擴展卡爾曼濾波器的設(shè)計與傳感器融合
有多種方法可以將IMU和羅盤數(shù)據(jù)融合起來,例如互補濾波器、統(tǒng)計學(xué)ARMA濾波器,卡爾曼濾波器等。我們在本文中使用的是擴展卡爾曼濾波器。
首先,我們需要介紹本文中使用的一些定義。
坐標(biāo)定義
T航向或方向是兩個坐標(biāo)(即坐標(biāo)系)之間的關(guān)系。一個坐標(biāo)總在變化,另一個坐標(biāo)保持不變。對于坐標(biāo)定義方法,我們使用導(dǎo)航坐標(biāo)和體坐標(biāo)。與東北地(NED)坐標(biāo)系或地理方法相反,我們將測量的初始體坐標(biāo)值定義為導(dǎo)航坐標(biāo)系,此后該坐標(biāo)為恒定坐標(biāo)。從體坐標(biāo)到導(dǎo)航坐標(biāo)的映射(投影)矩陣定義為
姿態(tài)定義
與歐拉角或方向余弦矩陣(DCM)不同,我們在這里使用四元數(shù),定義為
常用于導(dǎo)航以避免奇異性。
用卡爾曼濾波器更新姿態(tài)
我們在本文中使用的運動學(xué)方程(即狀態(tài)轉(zhuǎn)移方程)是非線性微分方程,因此需要使用一個EKF,用于對該微分方程進行一階近似。對于EKF設(shè)計,我們定義
一個1×7向量作為狀態(tài)變量,其中
為角速率;
為姿態(tài)四元數(shù)。
一個1×7向量作為觀測變量,與狀態(tài)變量具有相同的分量。
一個7×7矩陣作為狀態(tài)轉(zhuǎn)移矩陣,其中,A的第一部分是角速率的數(shù)字化微分方程,第二部分是數(shù)字化四元數(shù)更新方程,后者從運動學(xué)方程推導(dǎo)而來。
一個7×7矩陣作為觀察矩陣。
為誤差協(xié)方差矩陣,這是一個7×7矩陣,其中
估計向量 x?真實值xx之間的誤差我們在測試中將初始誤差設(shè)為相對較小的值。該值會自動收斂到一個小值。
被設(shè)為狀態(tài)轉(zhuǎn)移噪聲和觀測噪聲的協(xié)方差矩陣。我們得到它們的初始值,
在保持IMU和羅盤處于靜止?fàn)顟B(tài)的同時,通過測量陀螺儀和加速器的交流均方根值的平方得到。我們設(shè)
根據(jù)以上定義,卡爾曼濾波器將通過以下五個步驟完成:
步驟1:使用公式3計算卡爾曼增益K
步驟2:計算誤差協(xié)方差矩陣,P:
步驟3:輸出估算狀態(tài)x?:
步驟4:更新狀態(tài)x?–:
步驟5:更新誤差協(xié)方差矩陣P–:
該過程可以簡單地描述為圖4中的框圖。
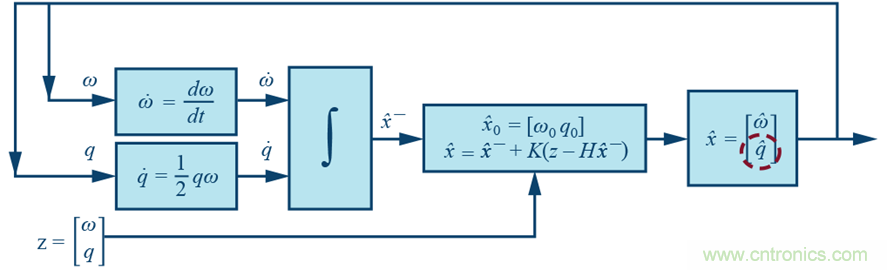
圖4. 用于更新姿態(tài)的卡爾曼濾波器流程圖。
基于MSE的傳感器融合
在上一節(jié)中,觀測變量是
其中沒有來自羅盤的信息。由于ω是角速率,我們只能使用四 元數(shù)來導(dǎo)入羅盤數(shù)據(jù)q. 我們使用MSE方法獲得q, 即觀測變量 中的組分。
我們將各變量定義如下:
mb和ab: 體坐標(biāo)系里的羅盤磁值和加速度值。
mn和an: 導(dǎo)航坐標(biāo)系里的羅盤磁值和加速度值。
mn0和an0: 導(dǎo)航坐標(biāo)系里的初始靜態(tài)羅盤磁值和加速度值。
為從體坐標(biāo)系到導(dǎo)航坐標(biāo)系的姿態(tài)轉(zhuǎn)換矩陣,用四元數(shù)表示,可以寫成
其給出了導(dǎo)航坐標(biāo)系中初始值與實時從體坐標(biāo)系映射到導(dǎo)航坐標(biāo)系的值之間的誤差ε。
根據(jù)之前的定義,MSE方法可用于求取最優(yōu)值。
通過求方程8的最小值:

對f(q)求導(dǎo)并使其等于零,
我們將獲得方差意義上的最優(yōu)q。我們使用高斯-牛頓方法,用一階梯度收斂來求解以上非線性方程。
通過組合角速率,我們將得到觀測變量
其中融合了卡爾曼濾波器中的羅盤數(shù)據(jù)和IMU數(shù)據(jù)。
該過程可以簡單地描述為圖5中的框圖。
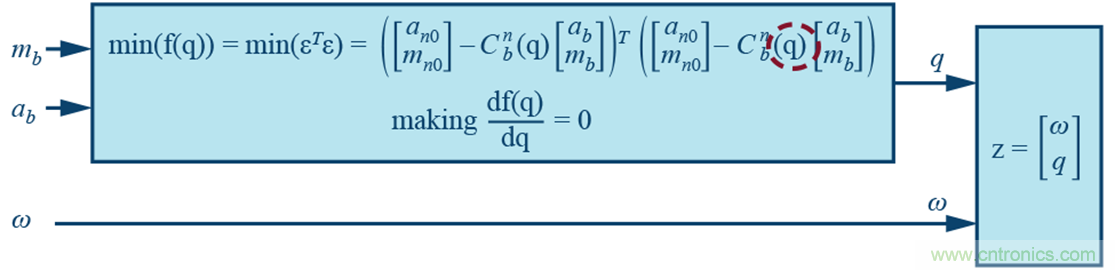
圖5. 使用MSE方法的傳感器融合框圖。
松耦合
如前所述,我們經(jīng)常遇到無法使用羅盤傳感器的情況。如果磁數(shù)據(jù)受到干擾,則求解的姿態(tài)精度將比僅使用IMU時更差。因此,我們使用松耦合來判斷磁傳感器是否可用。當(dāng)磁傳感器不可用時,我們只用IMU來求解姿態(tài);當(dāng)磁傳感器可用時,我們將使用融合算法找到姿態(tài),如圖6所示。
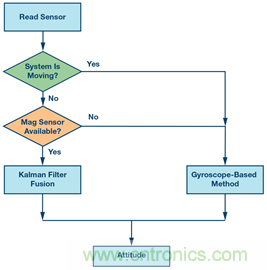
圖6. 姿態(tài)計算流程圖。
在獲得新數(shù)據(jù)之后或者在求解新的姿態(tài)時(在某些系統(tǒng)中,采樣周期與姿態(tài)解算周期不同,但我們在此處進行的是單采樣周期解算),我們計算加速度的大小,如果結(jié)果不等于1g, 我們 就不會使用加速器的輸出進行姿態(tài)計算。然后我們計算羅盤輸出的大小并將其與初始值進行比較。如果它們彼此不相等,我們就不會在此周期中使用地磁傳感器的數(shù)據(jù)。當(dāng)滿足兩個條件時,我們會使用卡爾曼濾波器并執(zhí)行MSE融合。
使用ADIS16470進行航位推算(DR)
在導(dǎo)航中,航位推算是計算當(dāng)前位置的過程,先使用先前確定的位置,然后在解算周期中基于已知或估計的速度或加速度更新該位置。這里將使用ADIS16470里的加速度計?;谏弦还?jié)解出的姿態(tài),我們可以得到捷聯(lián)系統(tǒng)的移動方向,然后需要計算該方向上的距離,最后確定位置。
捷聯(lián)航位推算需要使用基于加速度測量的比力方程來跟蹤INS的位置。比力方程可以簡單描述為等式10、等式11和等式12:
其中ae是地球坐標(biāo)系里的加速度,ab 是體坐標(biāo)系里的加速度,ve是地球坐標(biāo)系里的速度,se是地球坐標(biāo)系里的距離,ge 是 地球坐標(biāo)系里的重力加速為[0 0 1],單位為 g。需要強調(diào)的是,地球坐標(biāo)系與導(dǎo)航坐標(biāo)系不同——地球坐標(biāo)系是基于NED的。該 δtt是解算周期。
用第一個等式可以得到從IMU體坐標(biāo)系到地球坐標(biāo)系的加速度映射,如格式
第二個等式將加速度積分或累加為速度;然而,由于測量的加速度包含了重力分量,所以需要減去重力。
與等式11類似,等式12將速度積分成距離。
傳統(tǒng)方法存在幾個問題。
● 加速度計輸出總是有偏置,與重力相結(jié)合后,難以從公式10中減去,因此更準確的表達式應(yīng)為:

除非是用一些專業(yè)設(shè)備來測量該偏置,例如分度頭。
● 基于數(shù)值積分的實現(xiàn)方式,通常使用零階保持器方法(前一個值)進行積分。但是,對于連續(xù)移動,這將帶來重大的誤差。例如,我們來比較以下方法:
方法1:
(零階保持器)
方法2:
(線性插值)
在5秒內(nèi)加速度為為0.5 m/s2時,位移最高將相差4m。仿真結(jié)果如圖7所示。
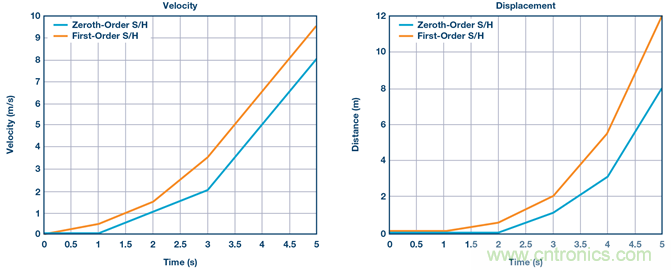
圖7. 速度計算中的零階保持與一階積分方法比較。
基于前面的討論,基于應(yīng)用,我們修改了傳統(tǒng)比例方程中的兩個地方:
X 我們不使用地球坐標(biāo)作為導(dǎo)航坐標(biāo)系。相反,正如我們在計算先前姿態(tài)時所做的那樣,我們用初始姿態(tài)
作為導(dǎo)航坐標(biāo)系。通過這種方式,偏置和重力都可以輕松取消,如公式14所示:

雖然姿態(tài)中同時包含了偏置和重力分量,但這樣我們就不需要將它們分開成單獨的分量,而是直接一起減去它們。
基于零階保持器與一階插值之間的比較,我們使用一階方法來獲得更準確的積分結(jié)果。
運動學(xué)模式和零速更新技術(shù)(ZUPT)
通過使用IMU的初始值作為導(dǎo)航坐標(biāo)系,我們可以消除一部分加速度的偏置影響。然而,即使我們在使用設(shè)備之前能用分度頭準確測量偏置,仍然很難取消,除非使用另一個精確的傳感器來定期校準它。這主要是由兩個原因引起的:一是偏置不穩(wěn)定,這意味著我們之前測量的偏置不是現(xiàn)在的實際偏置。二是速度隨機游走,由加速度噪聲積分而來。前面提到的不良特性會使我們計算的距離顯著漂移。即使我們停止移動并保持靜止,從加速度積分而來的速度仍然存在,距離仍會增加。
要解決這個問題,我們需要找到一種通過使用ZUPT技術(shù)重置速度的方法。ZUPT技術(shù)與具體的應(yīng)用密切相關(guān),因此我們需要獲得系統(tǒng)和應(yīng)用的運動學(xué)特征,然后給出一些算法規(guī)則。我們發(fā)現(xiàn)的運動學(xué)模式越多,結(jié)果就越準確。
我們通過移動帶有SINS系統(tǒng)的轉(zhuǎn)椅來進行實驗。由于我們的研究不限于特定應(yīng)用,我們使用以下運動學(xué)假設(shè):
● 對于航位推算,導(dǎo)航坐標(biāo)系中沒有z軸移動。此限制僅適用于航位推算,不適用于姿態(tài)求解。顯然,我們是在二維空間中移動系統(tǒng)。這有助于消除z軸誤差。
● 所有轉(zhuǎn)彎都發(fā)生在停止后。如果在移動時發(fā)生轉(zhuǎn)彎,則會因為引入額外加速而干擾姿態(tài)求解。
● 如果系統(tǒng)正在移動,加速度不能保持不變超過500毫秒。速度不能保持不變超過2秒。由于我們在推動或拉動轉(zhuǎn)椅,因此很難手動使力精確地保持不變超過500毫秒,并且個人很難以勻速持續(xù)推動轉(zhuǎn)椅2秒以上。事實上,我們正是運用這一規(guī)則來實施ZUPT。
● 加速度不能大于±1 m/s2。該規(guī)則用于一些噪音過濾,后者基于我們施加于椅子上、不會很大的拉力或推力。
如圖8所示,當(dāng)系統(tǒng)在X方向上移動時(投影到導(dǎo)航坐標(biāo)系后),Y方向也會產(chǎn)生加速度;積分后,Y方向速度不會為零,這意味著即使我們只是在X方向上移動,航位推算系統(tǒng)仍然會給我們帶來Y分量。
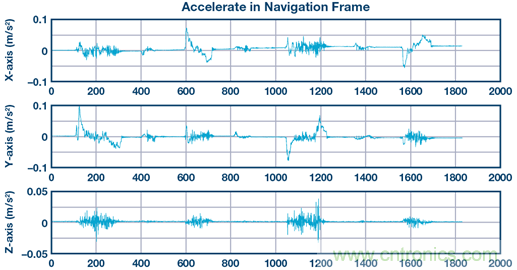
圖8. 導(dǎo)航坐標(biāo)系中三個方向的加速度。
基于第三條運動學(xué)假設(shè),我們可以使用ZUPT來消除此誤差。經(jīng)ZUPT處理之后的積分速度如圖9所示。
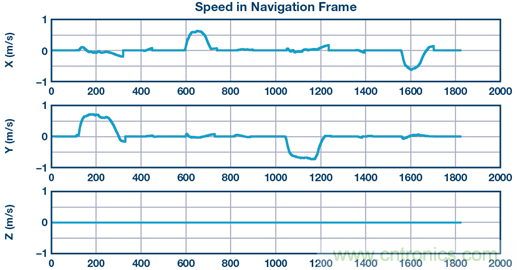
圖9. 導(dǎo)航坐標(biāo)系中三個方向的速度。
雖然我們使用了第三條假設(shè),如前所示,誤差仍然無法完全取消。誤差消除取決于設(shè)定的零加速度和零速度的判斷閾值。但是,大多數(shù)誤差已得到修正。
雖然使用了ZUPT,但有時仍然無法達到零速。這由兩個因素導(dǎo)致:
● 我們無法用ZUPT完全消除偏置不穩(wěn)定誤差和速度隨機游走。
● 我們求出的姿態(tài)有一些誤差,結(jié)果將導(dǎo)致投影(從體坐標(biāo)系到導(dǎo)航坐標(biāo)系)后的加速度誤差。
以圖10為例。圖10中的左圖是ADIS16470的原始數(shù)據(jù)(體坐標(biāo)系),圖10中的右圖是投影到導(dǎo)航坐標(biāo)系的加速度??梢钥闯觯V挂苿訒r,投影加速度不為零。由于它總是在變化,我們此處稱之為基線漂移。
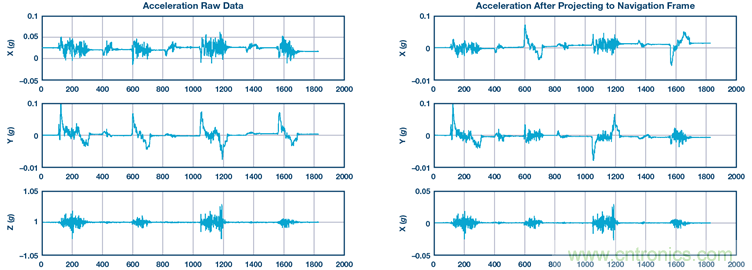
圖10. 體坐標(biāo)系(左)和導(dǎo)航坐標(biāo)系(右)的加速度。
為了消除基線漂移,我們需要實時連續(xù)獲得偏移偏置并從投影加速度中減去該值。結(jié)果如圖11所示
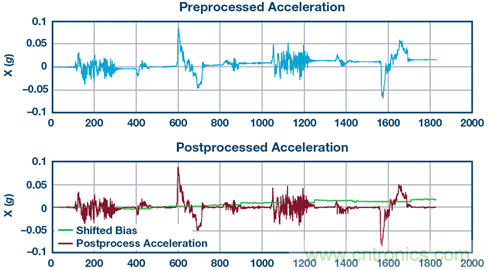
Figure圖11. 基線漂移消除之前(上)和之后(下)的加速度。
上圖是基線漂移消除前的加速度,下圖中的綠色軌跡是我們計算的基線偏移,紅色軌跡是基線偏移消除后的加速度。
可以使用圖12中的框圖簡要描述航位推算過程。我們將體坐標(biāo)系加速度ab和姿態(tài)轉(zhuǎn)移矩陣(來自AHRS)輸入
到DR系統(tǒng)。完成后,我們將獲得導(dǎo)航坐標(biāo)系中的位置。

圖12. 航位推算流程圖
實驗結(jié)果與結(jié)論
實驗結(jié)果
使用SPI端口,我們將ADIS16470評估板和RM3100羅盤評估板連接到ADI公司的ADuCM4050電路板,構(gòu)建出我們的系統(tǒng),如圖13所示。ADuCM4050 調(diào)整數(shù)據(jù)格式并進行時間同步(因為IMU和羅盤的數(shù)據(jù)速率不同)。然后使用UART將捕獲的數(shù)據(jù)傳輸?shù)接嬎銠C。所有計算(包括校準、AHRS和DR在MATLAB)均在MATLAB®中執(zhí)行。
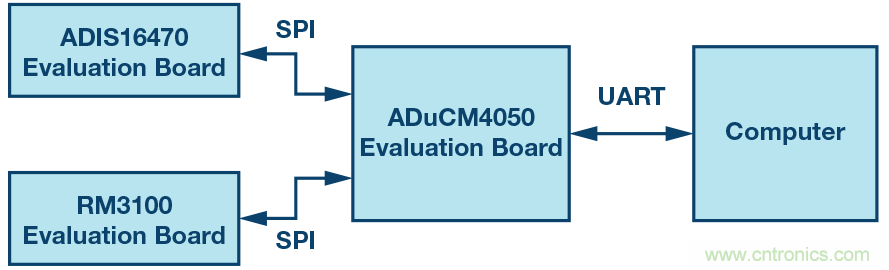
圖13. 實驗平臺設(shè)置。
將評估板和計算機放在轉(zhuǎn)椅上,并在實驗室中推著轉(zhuǎn)椅繞圈。
● AHRS輸出:姿態(tài)以四元數(shù)格式和DCM格式表示,如圖14所示。
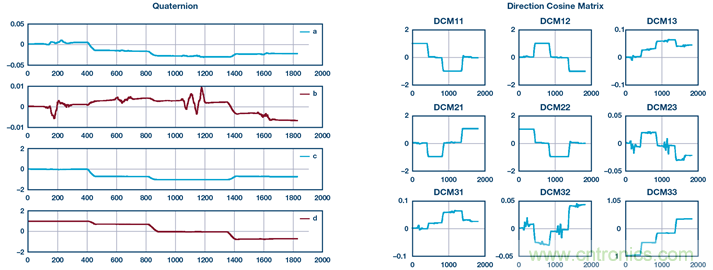
圖14. 四元數(shù)格式(左)和DCM格式(右)的姿態(tài)。
● DR輸出:帶XYZ位置的航位推算結(jié)果和三維圖如圖15所示。
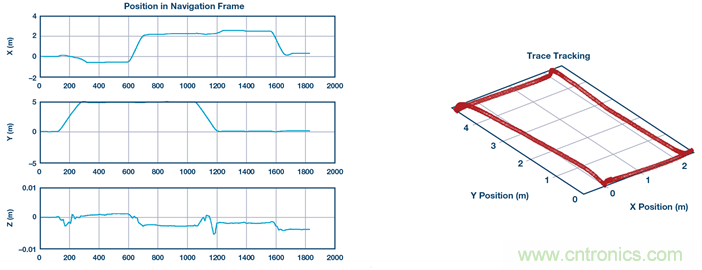
圖15. 位置計算結(jié)果。
結(jié)論
本文介紹了使用ADI公司的IMU ADIS16470和地磁傳感器RM3100構(gòu)建捷聯(lián)慣導(dǎo)系統(tǒng)的基本過程,介紹了我們使用的校準、AHRS和DR方法。在平臺和實驗環(huán)境等條件有限的情況下,很難進一步測試平臺和算法。
有很多方法可用于改善結(jié)果,例如:
● 使用里程表或UWB距離測量方法與IMU中的加速度計融合,以在DR中獲得更準確的距離值。
● 使用更復(fù)雜的運動學(xué)模型,從而在AHRS和DR中在傳感器和系統(tǒng)層次引入更多特性,例如系統(tǒng)的振動、加速和減速模型、地面平整度等。這意味著為了提高導(dǎo)航結(jié)果的準確性,需要給出更多的邊界條件。
● X 使用更精確的數(shù)值計算方法,比如用辛普森規(guī)則或三次樣條插值在DR中進行積分,或者使用牛頓方法而非高斯-牛頓方法求解非線性MSE方程等。
最后但也是最重要的一點,我們在試驗中發(fā)現(xiàn)INS與應(yīng)用或運動學(xué)模型緊密相關(guān)。例如,我們在兩個地方進行了實驗:未鋪地毯的實驗室和鋪有地毯的辦公室。如果我們使用相同的參數(shù)集,DR結(jié)果會顯示出巨大的差異。因此,無論哪種應(yīng)用,例如患者跟蹤、AGV導(dǎo)航或停車定位,或者對于同一應(yīng)用中的不同條 件,我們都需要全面了解其運動學(xué)模型。
參考電路
1 Long Li和Zhang He,“Automatic and Adaptive Calibration Method of Tri-axial Magnetometer”(三軸磁力計的自動和自適應(yīng)校準方法),《中國儀器儀表學(xué)報》,2013。
2 Timothy Sauer,Numerical Analysis(數(shù)值分析(第2版)),Pearson,2011。
3 David H. Titterton,Strapdown Inertial Navigation Technology(捷聯(lián)慣性導(dǎo)航技術(shù)(第2版)),電氣工程師學(xué)會,2004。
Gongmin, Yan,“Research on Vehicle Autonomous Positioning and Orientation System”(車輛自主定位定向系統(tǒng)研究),博士論文,中國西北工業(yè)大學(xué),2006。
Marins, João Luís,“An Extended Kalman Filter for Quaternion-Based Orientation Estimation Using MARG Sensors”(面向基于MARG傳感器的四元數(shù)方向估算應(yīng)用的擴展卡爾曼濾波器),IEEE,2001。
Prikhodko、Igor P.和Brock Bearss,“Towards Self-Navigating Cars Using MEMS IMU:Challenges and Opportunities”(使用MEMS IMU邁向自動駕駛汽車:挑戰(zhàn)與機遇),IEEE,2018。
RM3100.PNI傳感器公司,2018。
Woodman, Oliver J. “An Introduction to Inertial Navigation.” (慣性 導(dǎo)航簡介),劍橋大學(xué),2007年8月。
推薦閱讀:



