

【導(dǎo)讀】隨著電力電子技術(shù)的發(fā)展,開關(guān)磁阻電機(jī)控制基于結(jié)構(gòu)簡單,制作成本不高的特點將會變得更加容易并且控制效果更好。本文就詳細(xì)的為大家講解直線開關(guān)磁阻電機(jī)高精度位置控制設(shè)計方案。
電機(jī)是工業(yè)生產(chǎn)不可缺少的動力設(shè)備,電機(jī)的品種很多,作用也相當(dāng)廣泛。直線開關(guān)磁阻電機(jī)是一種新型的牽引電機(jī)。其主要有以下優(yōu)點:結(jié)構(gòu)簡單,制作成本不高。工作穩(wěn)定且能夠在惡劣的環(huán)境下長時間正常工作,比如高溫環(huán)境,開關(guān)磁阻電機(jī)有較好的散熱性能,可以在高溫下正常工作。隨著電力電子技術(shù)的發(fā)展,開關(guān)磁阻電機(jī)控制將會變得更加容易并且控制效果更好。
這種電機(jī)啟動轉(zhuǎn)矩大,過載能力強(qiáng),調(diào)速范圍廣。直線開關(guān)磁阻電機(jī)除了具有以上優(yōu)點以外,在一些需要做直線運(yùn)動的場合,它顯示出了強(qiáng)大的優(yōu)越性:再也不需要像傳統(tǒng)的做直線運(yùn)動的裝置那樣,通過絲桿等傳動裝置將旋轉(zhuǎn)的運(yùn)動轉(zhuǎn)化為直線運(yùn)動。這樣再一次的將中間環(huán)節(jié)給節(jié)省下來了,不僅降低了設(shè)備的成本,而且能量利用率也得到了提高。開關(guān)磁阻電機(jī)控制精度高,在高精度加工領(lǐng)域和大功率傳輸方面有廣泛的應(yīng)用前景。
1.2 項目背景/選題動機(jī)
現(xiàn)在有很多高精度加工平臺需要直線運(yùn)動的牽引機(jī)構(gòu),而目前的加工平臺大部分都是利用旋轉(zhuǎn)電機(jī)做牽引,再通過機(jī)械傳動裝置將運(yùn)動形式轉(zhuǎn)化為直線運(yùn)動加以利用。這樣不僅設(shè)備成本會很高,而且效率也不高。而直線開關(guān)磁阻電機(jī)本身的運(yùn)動形式就是直線的,如果運(yùn)用到這些設(shè)備上的話就會大大降低設(shè)備成本且效率也將會得到提高。
二、需求分析
本次設(shè)計大體分為四大部分:
(1)系統(tǒng)總體方案的設(shè)計,包括系統(tǒng)功能分析、系統(tǒng)架構(gòu)的建立、系統(tǒng)硬件設(shè)計等過程。
(2)基于單片機(jī)A/D,D/A,PWM等資源的應(yīng)用。
(3)電機(jī)模塊的設(shè)計。
2.1 功能要求
(1)電流傳感器
傳感器負(fù)責(zé)采集直線電機(jī)電流以反饋給控制器進(jìn)行處理。
(2)位置編碼器
位置編碼器將電機(jī)的運(yùn)動的位置反饋給控制器處理。
(3)微控制器
微控制器負(fù)責(zé)處理傳感器采集的電流、編碼器反饋回來的位置。當(dāng)位置指令給出以后,電機(jī)準(zhǔn)確且迅速運(yùn)動到指定位置。
(4)鍵盤模塊
鍵盤模塊負(fù)責(zé)給定輸入。
直線開關(guān)磁阻電機(jī)位置控制系統(tǒng)架構(gòu)如圖1所示。
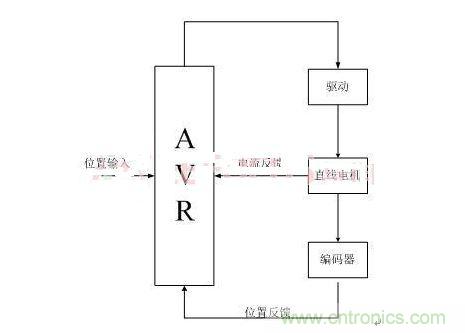
圖1 系統(tǒng)架構(gòu)圖
[page]
2.2 性能要求
(1)穩(wěn)定性
該系統(tǒng)能夠穩(wěn)定的工作,抗干擾能力好。
(2)快速性和實時性
電機(jī)能夠迅速的動作達(dá)到指定位置,達(dá)到實時控制的目的。
(3)準(zhǔn)確性
電機(jī)能夠準(zhǔn)確的運(yùn)動到指定位置。
三、方案設(shè)計
3.1 系統(tǒng)功能實現(xiàn)原理
系統(tǒng)主要分為5個部分,包括位置檢測部分、電流采集部分、MCU控制部分、電機(jī)模塊、按鍵輸入給定位置部分。系統(tǒng)通過MCU的并口I/O一直檢測各路傳感器狀態(tài),按照給定輸入值進(jìn)行動作。
3.2 硬件平臺選用及資源配置
MCU控制部分采用Atmel公司提供的一款基于AVR32 AT32UC3A單片機(jī)控制器的EVK1100模塊。
3.3系統(tǒng)軟件架構(gòu)
為了突出系統(tǒng)的實時性,軟件設(shè)計按鍵輸入的給定。值和編碼器輸入的位置都采用中斷的方式來處理。具體軟件流程圖2和圖3所示。
3.4 系統(tǒng)軟件流程
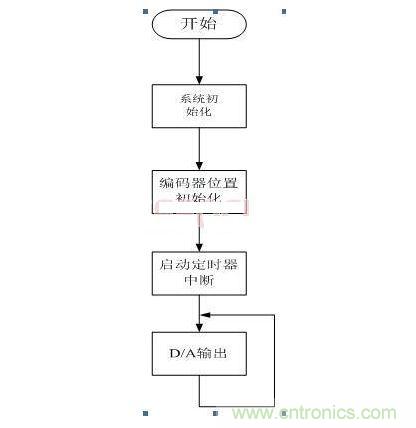
圖2 微控制器工作流程圖
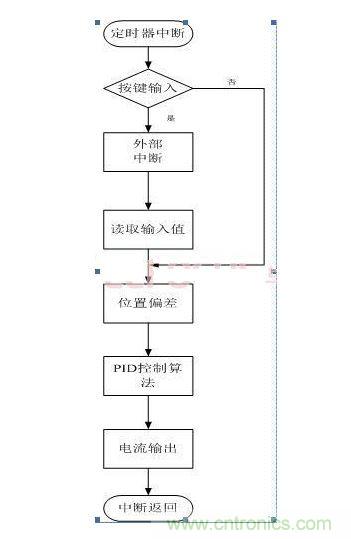
圖3 中斷子程序流程
3.5 系統(tǒng)預(yù)計實現(xiàn)結(jié)果
在電機(jī)的位置控制精度在1um級的前提下,盡量提高其位置控制精度。嘗試各種高級算法(魯棒控制、自適應(yīng)以及模糊神經(jīng)網(wǎng)絡(luò))在保證精度的前提下,達(dá)到實時控制。



