

【導(dǎo)讀】慣性導(dǎo)航及控制系統(tǒng)最初主要為航空航天、地面及海上軍事用戶所應(yīng)用, 是現(xiàn)代國(guó)防系統(tǒng)的核心技術(shù)產(chǎn)品,被廣泛應(yīng)用于飛機(jī)、導(dǎo)彈、艦船、潛艇、坦克 等國(guó)防領(lǐng)域。隨著成本的降低和需求的增長(zhǎng),慣性導(dǎo)航技術(shù)已擴(kuò)展到大地測(cè)量、 資源勘測(cè)、地球物理測(cè)量、海洋探測(cè)、鐵路、隧道等商用領(lǐng)域,甚至在機(jī)器人、攝像機(jī)、兒童玩具中也被廣泛應(yīng)用。
慣性導(dǎo)航系統(tǒng)(INS)是一種自主式的導(dǎo)航設(shè)備,能連續(xù)、實(shí)時(shí)地提供載體位置、姿態(tài)、速度等信息;特點(diǎn)是不依賴外界信息,不受氣候條件和外部各種干擾因素。

不同領(lǐng)域使用慣性傳感器的目的、方法大致相同,但對(duì)器件性能要求的側(cè) 重各不相同。從精度方面來看,航天與航海領(lǐng)域?qū)纫蟾撸溥B續(xù)工作時(shí)間 也長(zhǎng);從系統(tǒng)壽命來看,衛(wèi)星、空間站等航天器要求最高,因其發(fā)射升空后不可 更換或維修;制導(dǎo)武器對(duì)系統(tǒng)壽命要求最短,但可能須要滿足長(zhǎng)時(shí)間戰(zhàn)備的要求 。涉及到軍事應(yīng)用等領(lǐng)域,對(duì)可靠性要求較高。

慣性導(dǎo)航的工作原理
慣性導(dǎo)航系統(tǒng)是一種自主式的導(dǎo)航方法,它完全依靠載體上的設(shè)備自主地 確定載體的航向、位置、姿態(tài)和速度等導(dǎo)航參數(shù),而不需要借助外界任何的光、 電、磁等信息。

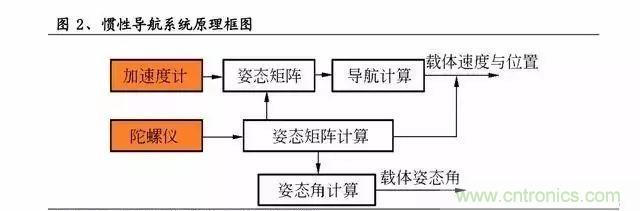
慣性導(dǎo)航是一門涉及精密機(jī)械、計(jì)算機(jī)技術(shù)、微電子、光學(xué)、自動(dòng)控制、材料等多種學(xué)科和領(lǐng)域的綜合技術(shù)。其基本工作原理是以牛頓力學(xué)定律為 基礎(chǔ),通過測(cè)量載體在慣性參考系的加速度、角加速度,將它對(duì)時(shí)間進(jìn)行一次積 分,求得運(yùn)動(dòng)載體的速度、角速度,之后進(jìn)行二次積分求得運(yùn)動(dòng)載體的位置信息 ,然后將其變換到導(dǎo)航坐標(biāo)系,得到在導(dǎo)航坐標(biāo)系中的速度、偏航角和位置信息等。
慣性導(dǎo)航系統(tǒng)分類
慣性導(dǎo)航系統(tǒng)根據(jù)陀螺儀的不同,可分為機(jī)電(包含液浮、氣浮、靜電、 撓性等種類)陀螺儀、光學(xué)(包含激光、光纖等種類) 陀螺儀、微機(jī)械(MEMS)陀螺儀等類型的慣性導(dǎo)航系統(tǒng)。

根據(jù)慣性導(dǎo)航系統(tǒng) 的力學(xué)編排實(shí)現(xiàn)形式又可以分為 :平臺(tái)式慣性導(dǎo)航系統(tǒng)和 捷聯(lián)式慣性導(dǎo)航系統(tǒng)。
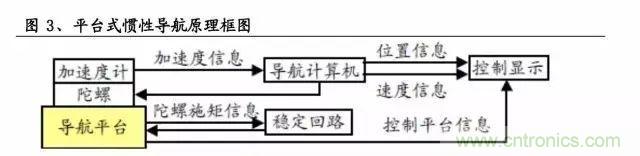
平臺(tái)式慣性導(dǎo)航系統(tǒng)是將陀螺儀和加速度等慣性元件通過萬(wàn)向支架角運(yùn)動(dòng) 隔離系統(tǒng)與運(yùn)動(dòng)載物固聯(lián)的慣性導(dǎo)航系統(tǒng)。,其慣性測(cè)量裝臵(加速度計(jì)和陀螺儀)安裝在機(jī)電導(dǎo)航平臺(tái)上,以平臺(tái)坐標(biāo)系為基準(zhǔn),測(cè)量運(yùn)載體運(yùn)動(dòng)參數(shù)。平臺(tái)式 慣性導(dǎo)航系統(tǒng)通過框架伺服系統(tǒng)隔離了載體的角運(yùn)動(dòng),因此可以獲得較高的系統(tǒng)精度。
捷聯(lián)式慣性導(dǎo)航系統(tǒng),其慣性測(cè)量裝臵(加速度計(jì)和陀螺儀)直接裝在飛 行器、艦艇、導(dǎo)彈等載體上,載體轉(zhuǎn)動(dòng)時(shí),加速度計(jì)和陀螺儀的敏感軸指向也跟隨轉(zhuǎn)動(dòng)。陀螺儀測(cè)量載體角運(yùn)動(dòng),計(jì)算載體姿態(tài)角,從而確定加速度計(jì)敏感軸指向 。再通過坐標(biāo)變換,將加速度計(jì)輸出的信號(hào)變換到導(dǎo)航坐標(biāo)系上,進(jìn)行導(dǎo)航計(jì)算。

目前,平臺(tái)慣導(dǎo)系統(tǒng)已經(jīng)達(dá)到了很高的水平,但是其造價(jià)、維修費(fèi)用十分 昂貴,而且其采用了框架伺服系統(tǒng),相對(duì)可靠性將會(huì)下降。捷聯(lián)式慣性導(dǎo)航技術(shù)是 20世紀(jì) 60 年代發(fā)展起來的,將慣性測(cè)量裝臵直接安裝在載體而非機(jī)電平臺(tái)上,以數(shù)學(xué)平臺(tái)代替機(jī)電式導(dǎo)航平臺(tái)的導(dǎo)航技術(shù),捷聯(lián)系統(tǒng)慣性測(cè)量裝臵便于安裝 、維修和更換,體積小,是慣性導(dǎo)航技術(shù)的一個(gè)重要發(fā)展方向。但是,捷聯(lián)系統(tǒng) 由于把慣性測(cè)量裝臵直接固定在載體上,導(dǎo)致慣性測(cè)量裝臵工作環(huán)境惡化,降低 了系統(tǒng)的應(yīng)用精度。

慣性器件
慣性導(dǎo)航系統(tǒng)通常由慣性測(cè)量裝臵、計(jì)算機(jī)、顯示器等組成。慣性測(cè)量裝 臵由兩大核心慣性元器件組成:加速度計(jì)和陀螺儀。三個(gè)自由度的陀螺用來測(cè)量 飛行器的角加速度,三個(gè)加速度計(jì)用來測(cè)量飛行器的加速度,計(jì)算機(jī)通過測(cè)得的 角加速 度和加速度數(shù)據(jù)計(jì)算出飛行器的速度和位子數(shù)據(jù)。性能先進(jìn)的慣性器件是 先進(jìn)慣性導(dǎo)航系統(tǒng)的前提。

陀螺儀
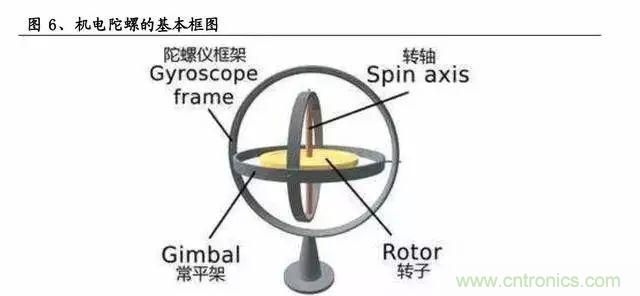
傳統(tǒng)意義上的陀螺儀是安裝在框架中繞回轉(zhuǎn)體的對(duì)稱軸高速旋轉(zhuǎn)的物體。 陀螺儀具有穩(wěn)定性和進(jìn)動(dòng)性,利用這些特性制成了敏感角速度的速率陀螺和敏感 角偏差的位置陀螺。由于光學(xué)、MEMS 等技術(shù)被引入于陀螺儀的研制,現(xiàn)在習(xí)慣上把能夠完成陀螺功能的裝臵統(tǒng)稱為陀螺。

陀螺儀種類多樣,按陀螺轉(zhuǎn)子主軸所具有的進(jìn)動(dòng)自由度數(shù)目可分為二自由 度陀螺儀和單自由度陀螺儀;按支承系統(tǒng)可分為滾珠軸承支承陀螺,液浮、氣浮 與磁浮陀螺,撓性陀螺(動(dòng)力調(diào)諧式撓性陀螺儀),靜電陀螺;按物理原理分為利用高速旋轉(zhuǎn)體物理特性工作的轉(zhuǎn)子式陀螺,和利用其他物理原理工作的半球諧振 陀螺、微機(jī)械陀螺、環(huán)形激光陀螺和光纖陀螺等。
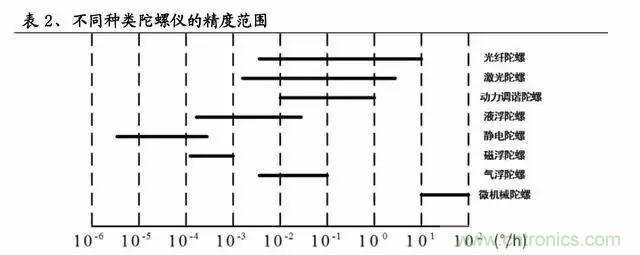
根據(jù)其精度范圍大致分為超高精度陀螺儀、中高精度陀螺儀和低精度陀螺 儀。超高精度陀螺儀指精度范圍在 10-6 o/h~5*10-4 o/h 范圍內(nèi)的陀螺儀,主要包括液浮陀螺、靜電陀螺等,目前最高精度的陀螺儀是靜電陀螺儀。中高精度陀螺 儀指精度在 5*10-4 o/h~10-1 o/h 的陀螺儀,目前最有發(fā)展前景的陀螺儀是光學(xué)陀螺儀,激光陀螺屬于第一代光學(xué)陀螺,光纖陀螺屬于第二代光學(xué)陀螺,最近幾年 ,由于光纖陀螺在精度、性能和尺寸上具有更大的潛力,越來越受到各國(guó)軍方的 青睞。低精度陀螺儀是指精度范圍超過 10-1 o/h 的陀螺儀,目前發(fā)展前景較好的是MEMS 陀螺儀,雖然精度低,但低廉的價(jià)格使其具有廣闊的應(yīng)用前景。

機(jī)電陀螺
機(jī)電陀螺是傳統(tǒng)的第一、二代陀螺儀,主要包括第一代液浮、氣浮、磁懸浮陀螺,以及撓性、靜電等第二代陀螺。機(jī)電陀螺的共同點(diǎn)在于轉(zhuǎn)子都是安裝在框 架中繞回轉(zhuǎn)體的對(duì)稱軸高速旋轉(zhuǎn),屬于剛體轉(zhuǎn)子陀螺儀,不同點(diǎn)在于支撐系統(tǒng)不 一樣。第一代液浮、氣浮、磁懸浮陀螺精度雖高,但結(jié)構(gòu)復(fù)雜,制造困難、成本 很高。隨著慣性導(dǎo)航系統(tǒng)的推廣,尤其是在飛機(jī)上的廣泛應(yīng)用,尋求一種中高精 度、但結(jié)構(gòu)簡(jiǎn)單、成本較低的陀螺成為當(dāng)時(shí)迫切需要解決的問題。
撓性陀螺
60 年代初,出現(xiàn)了一種新穎支撐原理的撓性陀螺解決了第一代陀螺儀的問題。撓性陀螺的轉(zhuǎn)子利用撓性接頭支撐,去除了支承軸上的摩擦干擾力矩,具有體積小、重量輕、可靠性高、成本低、能夠消除支承摩擦的優(yōu)點(diǎn),目前應(yīng)用范圍廣 泛,從平臺(tái)式到捷聯(lián)式,從飛機(jī)、導(dǎo)彈到艦船、航天飛行器均有所應(yīng)用。
靜電陀螺
靜電陀螺是應(yīng)用電場(chǎng)原理,在超真空的腔體內(nèi)由靜電場(chǎng)產(chǎn)生的吸力來支承 球形轉(zhuǎn)子的一種自由轉(zhuǎn)子陀螺,和撓性陀螺同屬第二代陀螺儀。靜電陀螺技術(shù)是 當(dāng)今世界上最高精度的慣性技術(shù),目前世界上只有美國(guó)、俄羅斯、法國(guó)和中國(guó)掌 握并成功地應(yīng)用了這一技術(shù)。靜電陀螺慣性系統(tǒng)價(jià)格昂貴、結(jié)構(gòu)體積較為龐大, 一般應(yīng)用在彈道導(dǎo)彈核潛艇或航空母艦上。
光學(xué)陀螺
光學(xué)儀器被用來測(cè)量地球的轉(zhuǎn)動(dòng)始于 1913 年法國(guó)物理學(xué)家 Sagnac 提出的 Sagnac效應(yīng),真正實(shí)用的激光陀螺在 1963 年研制成功。此后,基于 Sagnac 效應(yīng)的光學(xué)陀螺迅速發(fā)展,激光陀螺和光纖陀螺是目前軍事應(yīng)用領(lǐng)域使用最廣泛的陀 螺,以其為主要慣性器件的捷聯(lián)慣性導(dǎo)航系統(tǒng)更是逐步取代成本高昂的基于機(jī)電 陀螺的平臺(tái)式慣性導(dǎo)航系統(tǒng)和捷聯(lián)式慣性導(dǎo)航系統(tǒng)。

加速度計(jì)
加速度計(jì)是慣性導(dǎo)航系統(tǒng)的另一核心元件。加速度計(jì)是用來感測(cè)運(yùn)動(dòng)載體 沿一定方向的比力的慣性器件,可以測(cè)量出加速度和重力,從而計(jì)算載體的速度和位臵。加速度計(jì)的分類:按照輸入與輸出的關(guān)系可分為普通型、積分性和二次積 分型;按物理原理可分為擺式和非擺式,擺式加速度計(jì)包括擺式積分加速度計(jì)、 液浮擺式加速度計(jì)和撓性擺式加速度計(jì),非擺式加速度計(jì)包括振梁加速度計(jì)和靜 電加速度計(jì);按測(cè)量的自由度可分為單軸、雙軸、三軸;按測(cè)量精度可分為高精 度(優(yōu)于 10-4m/s2)、中精度(10-2 m/s2–10-3 m/s2)和低精度(低于 0.1m/s2)三類。

世界慣性導(dǎo)航市場(chǎng)的發(fā)展格局
世界慣性導(dǎo)航的發(fā)展進(jìn)程
由于陀螺儀是慣性導(dǎo)航的核心部件,因此,可以按各種類型陀螺出現(xiàn)的先 后、理論的建立和新型傳感器制造技術(shù)的出現(xiàn),將慣性技術(shù)的發(fā)展劃分為四代。 慣性導(dǎo)航技術(shù)的發(fā)展歷史如圖表 19 所示,折線下方為該階段建立的主要技術(shù)理論,上方為各階段出現(xiàn)的慣性器件及其精度。不過,慣性技術(shù)發(fā)展的各階段之間 并無(wú)明顯界線。

世界慣性導(dǎo)航市場(chǎng)格局
美國(guó)國(guó)防部把從事慣性技術(shù)領(lǐng)域研究和開發(fā)的國(guó)家分為 4 個(gè)層次:屬于第一層次的有美國(guó)、英國(guó)和法國(guó);屬于第二層次的有俄羅斯、德國(guó)、以色列和日本 ;屬于第三層次的有中國(guó)、澳大利亞、加拿大、瑞典、烏克蘭;屬于第四層次的有韓國(guó)、印度、巴西、朝鮮、瑞士、意大利等。所謂第一層次就是完全具備自主研 究和開發(fā)慣性技術(shù)能力的國(guó)家,第二層次的國(guó)家是指具備大部分的自主研發(fā)能力的國(guó)家,第三層次的國(guó)家是指具備部分研發(fā)能力的國(guó)家,第四層次的國(guó)家是指具備 很有限的從事慣性技術(shù)研發(fā)能力的國(guó)家。
推薦閱讀:



