
【導(dǎo)讀】本文從工程實踐角度,總結(jié)歷屆智能車大賽中無人駕駛技術(shù)進(jìn)展,從幾個潛在的突破點(diǎn)出發(fā)探討了自動駕駛/無人駕駛技術(shù)的實用化內(nèi)容,聚焦環(huán)境感知技術(shù)及車載傳感器、車輛系統(tǒng)集成、V2X和車聯(lián)網(wǎng)、高精度定位和地圖技術(shù)、深度學(xué)習(xí)和計算平臺等方面,其內(nèi)容可供智能車輛研發(fā)者參考。
近來,采埃孚(ZF)收購激光雷達(dá)公司Ibeo的40%股權(quán),Velodyne旗下激光雷達(dá)公司Velodyne LiDAR獲福特汽車和百度聯(lián)合注資1.5億美元。Mobileye宣布終止與特斯拉的合作,不再為特斯拉Autopilot系統(tǒng)提供EyeQ系列芯片支持,轉(zhuǎn)而與英特爾、寶馬共同開發(fā)無人駕駛汽車技術(shù)和技術(shù)平臺。這些智能車圈的熱點(diǎn)事件背后,是自動駕駛技術(shù)快速發(fā)展道路上的車載傳感器、核心部件、計算平臺等資源的整合,智能車輛研發(fā)進(jìn)入關(guān)鍵節(jié)點(diǎn)上、面向?qū)嵱没募夹g(shù)突破方面的考慮。
1、引言
1.1 從智能車挑戰(zhàn)賽看中國智能車發(fā)展情況
從2009開始,在國家自然科學(xué)基金委“視聽覺信息的認(rèn)知計算”重大研究計劃支持下,分別在西安、鄂爾多斯、赤峰、常熟等地舉辦了七屆“中國智能車未來挑戰(zhàn)賽”。智能車挑戰(zhàn)賽是現(xiàn)有的國內(nèi)外唯一專門面向無人駕駛的賽事,對中國無人駕駛車輛研究起到很大的推動作用。

歷屆中國智能車未來挑戰(zhàn)賽
在前幾屆比賽中,參賽無人車輛行駛還比較慢,需要較多的人工干預(yù)。在2013年之后,國內(nèi)相關(guān)研究單位取得了較大進(jìn)步,參賽無人車輛已能在真實交通環(huán)境中進(jìn)行順暢地自主駕駛,與其他車輛進(jìn)行交互。在諸多研究單位中,涌現(xiàn)出了清華大學(xué)、國防科技大學(xué)、同濟(jì)大學(xué)、上海交大、軍事交通學(xué)院、西安交通大學(xué)、北京理工、北京聯(lián)合大學(xué)、南京理工大學(xué)、中科院合肥物資研究院、武漢大學(xué)、湖南大學(xué)等知名團(tuán)隊。這些團(tuán)隊已經(jīng)和一汽集團(tuán)、上汽集團(tuán)、廣汽集團(tuán)、比亞迪和長城汽車等國內(nèi)眾多車企開展了許多深度合作。
不同年份中國無人駕駛車輛差異對比:

(a)2009年參賽無人車輛

(b)2015年參賽無人車輛
從上圖可以看出,2009年參賽無人車輛都是在現(xiàn)有商用車上經(jīng)過加裝外置傳感器和外置控制器等設(shè)備改裝而成。而在2015年參賽的部分無人車輛則體現(xiàn)了研究單位與車企深度合作的結(jié)果,已經(jīng)將大部分傳感器內(nèi)置并結(jié)合車載總線進(jìn)行了控制和深度改造。除此之外,國內(nèi)IT巨頭們也紛紛投入無人駕駛研究,例如樂視已在多處開展研發(fā),百度與寶馬合作的無人駕駛車輛已經(jīng)在北京的環(huán)路上進(jìn)行了測試,長安汽車從重慶到北京進(jìn)行了長途無人駕駛測試,這些車輛體現(xiàn)了不同等級智能化程度。在后續(xù)能夠集成人工智能研究最新成果,有望引領(lǐng)中國智能汽車發(fā)展。

IT企業(yè)和車企也投入智能車輛研發(fā)
1.2 無人駕駛面臨問題及潛在的突破點(diǎn)
雖然國內(nèi)外的智能車輛研究取得了極大的進(jìn)展,但是從近期的谷歌無人駕駛汽車和特斯拉自動駕駛汽車的事故來看,相關(guān)技術(shù)實用化還面臨多重挑戰(zhàn)。其中,最為關(guān)鍵的是如何提高環(huán)境感知精確程度,在環(huán)境感知能力上突破。在此基礎(chǔ)上,特別是針對許多突發(fā)的交通場景,無人車輛需要進(jìn)行智能決策和處理。
無人駕駛車輛的環(huán)境感知
本文探討了無人駕駛技術(shù)幾個潛在突破點(diǎn):
首先,需要面向自動駕駛功能進(jìn)行傳感感器選擇和優(yōu)化配置。由于交通環(huán)境的復(fù)雜性,需要高精度的傳感器進(jìn)行環(huán)境檢測?,F(xiàn)階段傳感器均受其工作范圍限制以及氣候環(huán)境因素和車輛運(yùn)動的干擾,無法保證所有情況下的保證安全駕駛的行車要素的準(zhǔn)確檢出。以激光雷達(dá)為典型的外部傳感器價格昂貴,極大限制了實際大范圍應(yīng)用。所以,需要面向復(fù)雜環(huán)境感知需求,集成低價、性能優(yōu)秀的車內(nèi)和車外傳感器,發(fā)揮各傳感器的優(yōu)勢,在合適的成本基礎(chǔ)上,按照不同等級的自動駕駛功能需求進(jìn)行自身姿態(tài)和周邊駕駛環(huán)境感知的傳感器選擇和優(yōu)化配置。
其次,需要面向自動駕駛重新設(shè)計的車載集成系統(tǒng)。結(jié)合全新自動駕駛架構(gòu)設(shè)計,結(jié)合集成化控制系統(tǒng)和新型總線分布,對自動駕駛功能進(jìn)行擴(kuò)展和集成。通過集成更優(yōu)秀感知和決策算法的車載軟件,使得自動駕駛系統(tǒng)具備更高安全性和魯棒性。
再次,需要V2X無線網(wǎng)絡(luò)支持。通過車聯(lián)網(wǎng)絡(luò)實現(xiàn)信息共享和傳感器視距和感知范圍擴(kuò)展。需要高精度GPS定位和高精度的3D地圖支持,降低對高精度環(huán)境感知的要求,降低實現(xiàn)高級自動駕駛系統(tǒng)的難度。
此外,需要高性能計算平臺支持。通過集成高性能車載計算平臺,結(jié)合深度學(xué)習(xí)技術(shù),擴(kuò)展車輛智能化水平。通過接入遠(yuǎn)程智能服務(wù)實現(xiàn)智能擴(kuò)展與共享,將人工智能技術(shù)的新突破應(yīng)用于無人駕駛。
2、面向不同等級的自動駕駛進(jìn)行傳感感器優(yōu)化配置
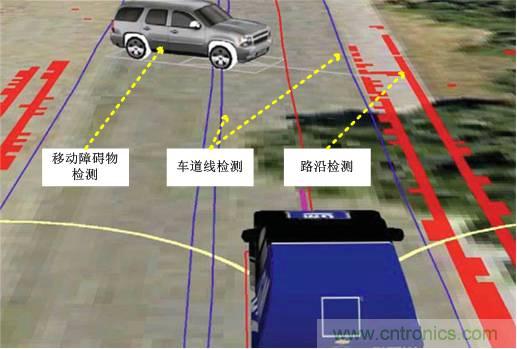
現(xiàn)階段常用的外部傳感器,只在某些特定情況下適用,精確感知需要進(jìn)行多傳感器信息融合。例如,毫米波雷達(dá)可以準(zhǔn)確檢測前方車輛的距離和速度,具備較強(qiáng)的穿透霧、煙、灰塵的能力;但無法對目標(biāo)進(jìn)行細(xì)化識別。而相機(jī)視覺系統(tǒng)可以獲得車道線、交通信號等目標(biāo)的顏色和形狀等細(xì)節(jié),從而進(jìn)行深度識別。但是相機(jī)視覺系統(tǒng)的測距能力沒有激光雷達(dá)精確。激光雷達(dá)通過點(diǎn)云來建立周邊環(huán)境的3D模型,可以檢測出包括車輛、行人、樹木、路緣等細(xì)節(jié)。所以,通過激光雷達(dá)或毫米波雷達(dá)與視覺傳感器進(jìn)行融合,不僅可以進(jìn)行目標(biāo)物體檢測,而且還能進(jìn)行目標(biāo)空間測距,目標(biāo)圖像識別等功能。類似,GPS定位、視覺傳感器和激光雷達(dá)進(jìn)行融合,則可以實現(xiàn)車道保持所需的高精度定位,也能實現(xiàn)多類障礙物目標(biāo)檢測。
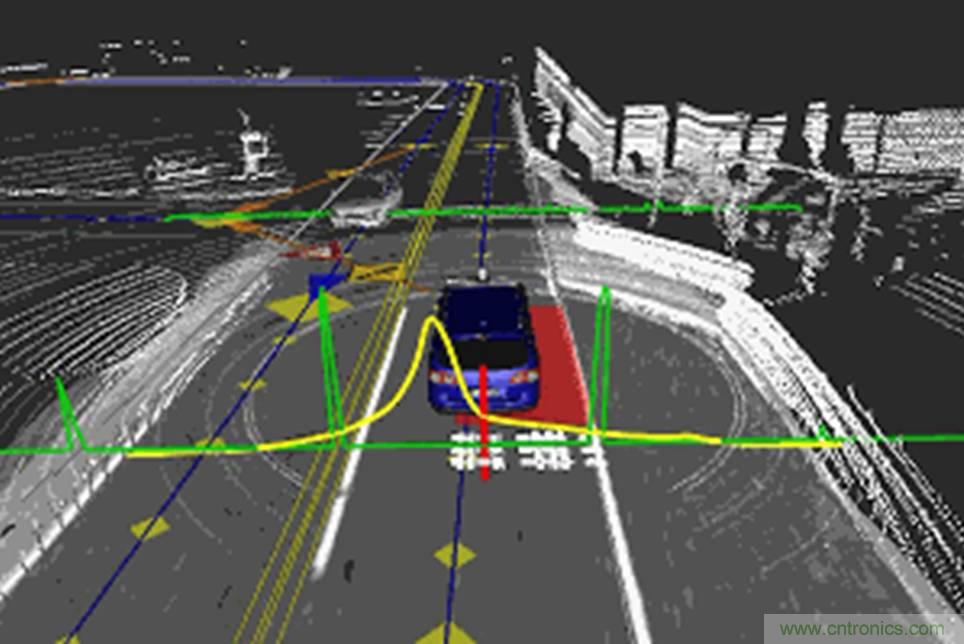
基于激光雷達(dá)等傳感器的環(huán)境感知模型
近期特斯拉汽車事故說明要做到高級自動駕駛僅靠單類傳感器則難以實現(xiàn),而是需要多種傳感器融合,特別是關(guān)鍵性傳感器不能減配。無人駕駛汽車的車載傳感器配置可作為完整性參考方案。
1、車載傳感器選擇參數(shù)
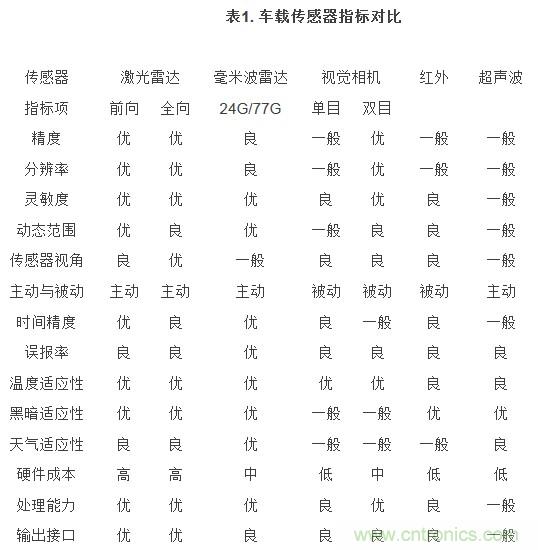
在選擇車載傳感器時,一般需要綜合考慮多個方面的屬性,包括傳感器精度、分辨率、靈敏度、動態(tài)范圍、傳感器視角、主動與被動傳感器、時間精度和輸出接口。以及誤報率、溫度適應(yīng)性、黑暗適應(yīng)性、不良天氣適應(yīng)性、硬件成本、信號處理能力等。表1是常見的幾類傳感器綜合指標(biāo),包括超聲波雷達(dá)、激光雷達(dá)、毫米波雷達(dá)、攝像頭、紅外探頭等,可以綜合考慮加以選取配置。
注:
(1)傳感器精度:真實值和傳感器的測量值之間的誤差,取決于外部干擾等因素。
(2)傳感器分辨率:兩次測量值之間的最小方差,通常比傳感器的實際精度更低。
(3)傳感器靈敏度:可檢測或測量的最小值。
(4)傳感器的動態(tài)范圍:最小以及可以準(zhǔn)確地報告最大值。
(5)傳感器視角:描述傳感器可以看到的視場角度。
(6)主動與被動傳感器:有源傳感器主動感測環(huán)境,無源傳感器則比較依賴環(huán)境條件。
(7)傳感器時間精度:傳感器的刷新速率和測量帶寬變化頻率
(8)傳感器輸出接口:輸出模擬電壓,電流,數(shù)字信號,串口或網(wǎng)絡(luò)數(shù)據(jù)流等方式。
(9)低誤報率:由于噪聲、干擾等引起檢測結(jié)果誤報的比例。
(10)溫度適應(yīng)性:是否能在不同溫度條件下正常工作。
(11)黑暗適應(yīng)性:是否能在不同光照條件下正常工作。
(12)不良天氣適應(yīng)性:是否能在下雨、揚(yáng)塵、潮濕等天氣中正常工作。
(13)低成本硬件:傳感器硬件價格成本。
(14)信號處理能力:傳感器數(shù)據(jù)量。
2、實現(xiàn)不同等級的自動駕駛所需傳感感器
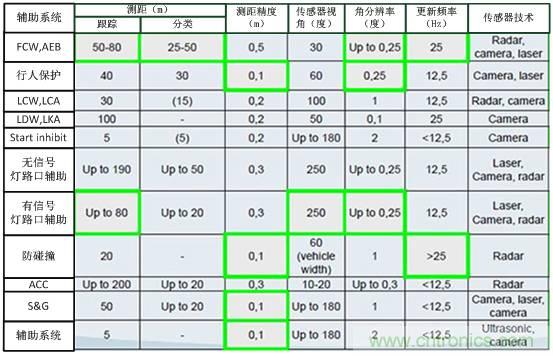
在不同等級的自動駕駛功能實現(xiàn)中,通過對雷達(dá)、激光雷達(dá)、視覺相機(jī)(單目、雙目和紅外)、超聲波等常見傳感器的優(yōu)劣勢分析,最終形成適當(dāng)?shù)能囕d傳感器配置。
表2. 實現(xiàn)不同自動駕駛功能所需傳感器及感知參數(shù)分析
如下圖所示,要實現(xiàn)典型的自動駕駛功能,要求車載傳感器能夠覆蓋長、短距檢測、兼顧日夜行駛等需求。典型方案中要求配備毫米波雷達(dá)傳感器6個(超長距前窄角1個,中距前窄角1個,后/側(cè)面廣角4個)、紅外夜視傳感器1個(長距前窄角)、圖像攝像頭6個(長距前窄角1個,短距廣角后方1個、側(cè)面4個)、以及超聲波傳感器4個(前/后側(cè)短距廣角)。
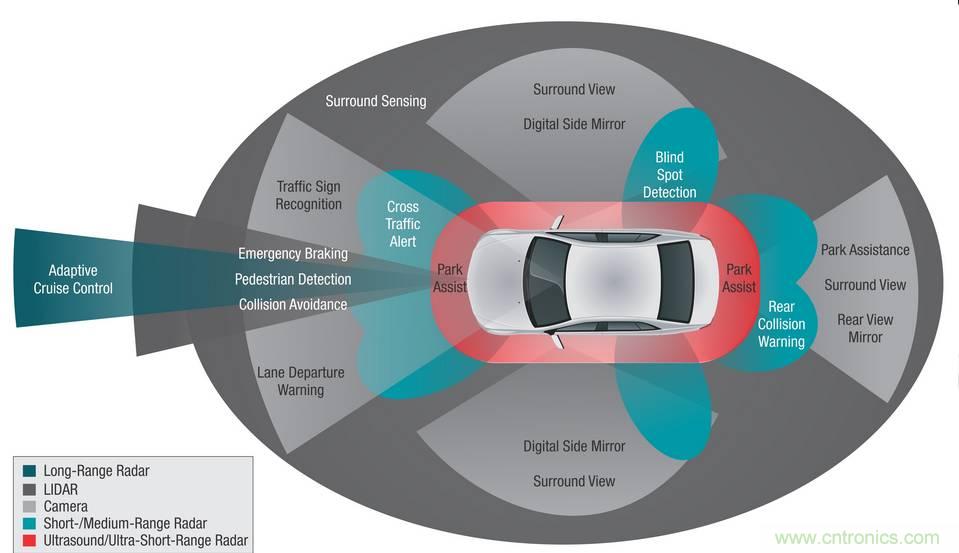
實現(xiàn)自動駕駛系統(tǒng)所需的車載傳感器配置
而要實現(xiàn)無人駕駛,除了上述傳感器之外,還需要選配高精度GPS定位系統(tǒng)及高精度測距傳感器,還需要應(yīng)對復(fù)雜路況的各類激光雷達(dá)傳感器等。如圖5所示,參加DARPA Urban Challenge比賽的Stanford 大學(xué)“Junior”無人車,則在大眾SUV基礎(chǔ)上,配備5個激光雷達(dá)(IBEO,Riegl,SICK和Velodyne),1個Applanix GPS慣性導(dǎo)航系統(tǒng),5個BOSCH毫米波雷達(dá),以及前向相機(jī)系統(tǒng)。
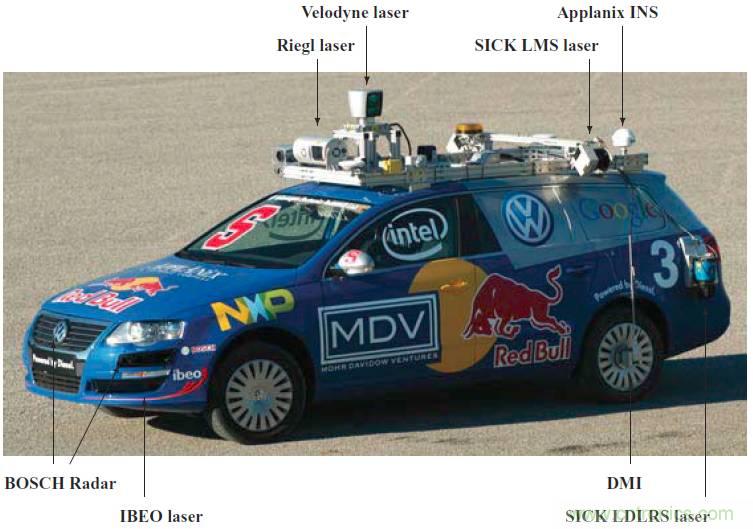
Junior無人駕駛車輛及其傳感器配置
Junior無人駕駛車輛定位通過Applanix POS LV 420集成慣性導(dǎo)航系統(tǒng)實現(xiàn),包括GPS方位航向測量、高性能慣性測量單元、車輪里程計(DMI)和OMNISTAR衛(wèi)星虛擬基站服務(wù),提供低于100厘米和0.1度的實時位置和方向誤差。2個側(cè)向的SICK LMS 291-S14激光雷達(dá)和1個前向的RIEGL LMS-Q120激光雷達(dá)提供3D道路結(jié)構(gòu)和車道標(biāo)線檢測,并進(jìn)行車輛高精度定位。1個車頂64線Velodyne HDL-64E激光雷達(dá)用于障礙物和移動車輛檢測,形成水平方向360度和垂直方向30度視域的掃描數(shù)據(jù),由車尾的2個SICK LDLRS激光雷達(dá)和前保險杠2個 IBEO ALASCA XT激光雷達(dá)進(jìn)行視野補(bǔ)充。5個安裝在前格柵的BOSCH長距離雷達(dá)(LRR2)提供周圍移動車輛的檢測信息。由兩個英特爾四核服務(wù)器通過一個千兆以太網(wǎng)進(jìn)行連接來提供傳感器融合等車載計算服務(wù)。
3、通過車載傳感器集成與智能化降低整體費(fèi)用
通過車載傳感器集成與智能化與能夠突破自動駕駛技術(shù)所需的環(huán)境感知基礎(chǔ)支撐,通過配置優(yōu)秀和價格低廉的車載傳感器,實現(xiàn)環(huán)境感知,推進(jìn)無人駕駛技術(shù)進(jìn)展。如圖6所示,現(xiàn)有的車載傳感器通過各類總線技術(shù)進(jìn)行集成和配置,再通過傳感器信息的智能化處理,輸出自動駕駛所需的環(huán)境感知信息。
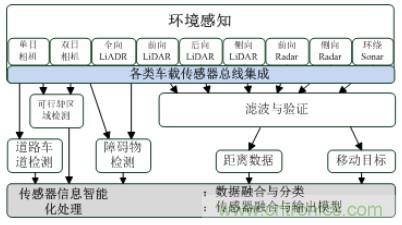
車載傳感器集成與智能化
同樣,智能車輛也需要從車身內(nèi)的傳感器的智能化與集成內(nèi)容入手,分析實現(xiàn)自動駕駛需要哪些車載傳感器。通過融合車載的IMU、車頭指向設(shè)備和GPS等傳感器進(jìn)行車輛位姿精確感知,實現(xiàn)車輛控制。
現(xiàn)有車輛設(shè)計還沒有考慮智能化需求,車身載傳感器的種類較多,分布在各個子系統(tǒng)中,有一些傳感器重復(fù)使用。下一階段,更多考慮智能化功能需求,并且通過傳感器的微型化、多功能和智能化、集成化發(fā)展。通過MEMS傳感器實現(xiàn)微型化;通過集成多功能、減少車載傳感器數(shù)量,提高車輛姿態(tài)感知可靠性;通過傳感器與微處理器結(jié)合集成智能化處理算法,減少ECU復(fù)雜度。通過傳感器總線集成,可以實現(xiàn)車身傳感器信息共享,降低了成本。例如,速度傳感器、加速度傳感器、加速踏板位置傳感器、節(jié)氣門位置傳感器、方向盤轉(zhuǎn)角傳感器等信息,可以智能車輛的各個子控制系統(tǒng)功能模塊中共享。

車載自身姿態(tài)感知傳感器方案
3、擴(kuò)展環(huán)境感知能力和降低對傳感器依賴
3.1通過V2X車輛聯(lián)網(wǎng)擴(kuò)展智能車環(huán)境感知能力
通過V2X應(yīng)用可以擴(kuò)展車載傳感器感知范圍,通過多車之間溝通各自速度、加減速和轉(zhuǎn)向等信息,提高自動駕駛安全性,為交通的可預(yù)測和管控提供基礎(chǔ)。通過V2X應(yīng)用廣播前車的環(huán)境感知結(jié)果,使得施工、交通事故、道路異物、坑洞和路滑等情況可以預(yù)先告知后車,有效提高自動駕駛安全。使智能車輛的環(huán)境感知范圍擴(kuò)大,不再受限于車載傳感器的視距范圍限制,減少了多變的天氣和復(fù)雜環(huán)境因素影響。
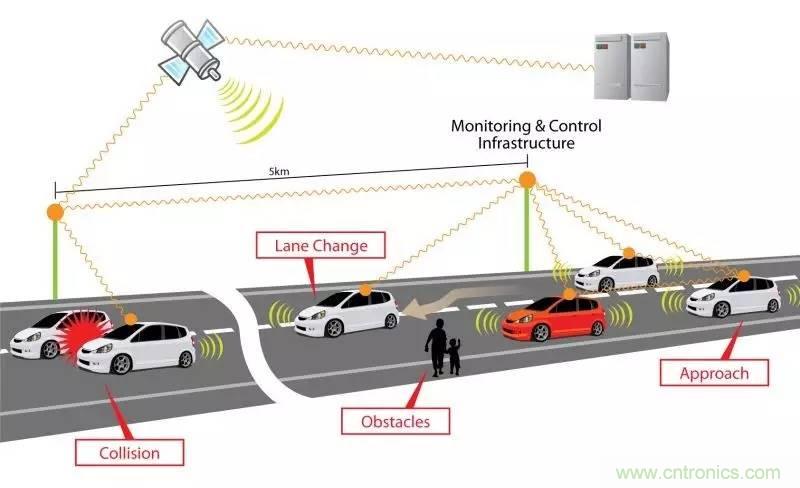
基于V2X技術(shù)擴(kuò)展智能車輛感知能力
通過V2X網(wǎng)絡(luò)互聯(lián)到云端,可以獲得更大范圍的環(huán)境信息,擴(kuò)展了實時導(dǎo)航和路徑規(guī)劃等服務(wù)。在沒有網(wǎng)絡(luò)信號的地方,通過本地通訊服務(wù),在幾百米范圍內(nèi)形成車間局域網(wǎng)絡(luò),形成一個幾公里范圍的視野,更容易實現(xiàn)安全的自動駕駛。
現(xiàn)階段較多采用IEEE802.11P等短距通訊來構(gòu)建DSRC短程車間網(wǎng)絡(luò),更大范圍的網(wǎng)絡(luò)基于LET-V等技術(shù)來構(gòu)建,還包括LTE標(biāo)準(zhǔn)(LTE V2X)技術(shù),通過LTE-Direct (LTE-D)技術(shù)能尋找500m內(nèi)數(shù)千車載設(shè)備并提供服務(wù),讓最接近的LTE-D設(shè)備實現(xiàn)通訊。此外,正在發(fā)展中的5G網(wǎng)路技術(shù)也可為車載應(yīng)用構(gòu)建基礎(chǔ)支撐。DSRC之類短距通訊已經(jīng)開展并通過了一系列的現(xiàn)場測試,進(jìn)入實際部署工作;而LTE V2X等新技術(shù)還在開發(fā)階段,需要制定新標(biāo)準(zhǔn)和開展更多測試。
3.2基于高精度定位和3D高精度地圖支持降低對傳感器依賴
智能車輛都采用GPS或者北斗等全球定位系統(tǒng)進(jìn)行定位和導(dǎo)航,現(xiàn)階段還需要提高定位系統(tǒng)的精度,提供高精度導(dǎo)航地圖來滿足自動駕駛需求。通過提供厘米級的定位以及應(yīng)對復(fù)雜駕駛環(huán)境的精確三維地圖數(shù)據(jù),智能車輛獲得最佳行車路線,地形特征,位置映射等,方便進(jìn)行動態(tài)目標(biāo)檢測和障礙物檢測等,極大降低對傳感器依賴。
1、高精度定位系統(tǒng)
民用級GPS在接收到4個或更多衛(wèi)星時能提供約為十米級的定位精度,差分GPS((Differential Global Positioning System)通過在位置已經(jīng)精確測定的已知點(diǎn)上配備一臺 GPS 接收機(jī)作為固定地面參考點(diǎn),參考點(diǎn)和定位設(shè)備間利用廣播等方式增加一步位置修正,可以達(dá)到米級定位精度。要實現(xiàn)厘米級精度的定位,還需要將GPS設(shè)備和高精度慣性測量單元(IMU)結(jié)合起來,GPS提供高精度定位數(shù)據(jù),慣性測量單元提供高頻率采集數(shù)據(jù)。例如,在自動駕駛方案中采用Applanix POS的系統(tǒng)提供多雙頻GPS接收信息實時集成,包括GPS方位航向測量、高性能慣導(dǎo)測量單元(6自由度、安裝靠近后軸處)、車輪里程計(DMI)、OMNISTAR衛(wèi)星虛擬基站服務(wù)等,系統(tǒng)實時位置誤差通??傻陀?00厘米,方向誤差低于0.1度。這些高精度定位方法成本較貴,限制了實際大范圍應(yīng)用。后續(xù)需要集成基于低功耗、低價、微小型智能定位傳感器,提供高精度定位服務(wù)。

Applanix POS LV420系統(tǒng)
2、高精度導(dǎo)航地圖
目前所用導(dǎo)航地圖所提供信息的精細(xì)程度還無法滿足自動駕駛要求。通過采用激光雷達(dá)獲取三維點(diǎn)云數(shù)據(jù),并進(jìn)行人工標(biāo)記之后建立路面模型,包含道路上較為全面的交通標(biāo)志、交通信號燈等信息,還包括車道線位置、數(shù)量和寬度等信息,包括道路坡度和斜率等,還包括車道限高、下水道口、障礙物以及其他道路上一些細(xì)節(jié)。地圖既可以提供當(dāng)前道路的靜態(tài)環(huán)境模型,也可以通過預(yù)先存儲的點(diǎn)云和圖像特征數(shù)據(jù)來提供高精度定位。
在高精度地圖技術(shù)路線中,一類是谷歌和Here的激光雷達(dá)和攝像頭獲取3D點(diǎn)云數(shù)據(jù)測量的地圖,在點(diǎn)云數(shù)據(jù)基礎(chǔ)上進(jìn)而建模分類得到高精度地圖。另外一類是通用、大眾聯(lián)手Mobileye的RoadBook眾包地圖,通過車輛攝像頭和GPS,結(jié)合本地以及云端軟件來開展高精度地圖服務(wù)。
高精度地圖需要使用高精度激光雷達(dá),收集數(shù)據(jù)后進(jìn)行人工標(biāo)記才能使用,比較耗時費(fèi)力,測繪成本較高,不會頻繁更新數(shù)據(jù),實用性下降。采用眾包方式收集數(shù)據(jù),通過每輛車載終端得到車道線、各項道路標(biāo)志以及道路上的基礎(chǔ)交通設(shè)施等信息發(fā)送云端,雖然精度不如激光雷達(dá)測定,但通過增加數(shù)據(jù)量來提高精度,可以降低成本,并且實時更新地圖。例如,Mobileye通過EyeQ4系統(tǒng)上增加更多檢測設(shè)備并整合其軟件系統(tǒng),結(jié)合道路經(jīng)驗管理系統(tǒng)(RoadExperience Management,REM),利用深度學(xué)習(xí)技術(shù)來對道路上各種行車要素的識別和采集,最后構(gòu)建Roadbook。REM根據(jù)駕駛環(huán)境來綜合分析路況,如前車運(yùn)動軌跡、路邊靜止的物體等信息,得到合適的可行駛路線。所采集信息在本地進(jìn)行預(yù)處理之后得到近處以一維數(shù)據(jù)為主的表示,結(jié)合必要的三維數(shù)據(jù),最終讓地圖信息保持較小規(guī)模,方便及時上傳與下載更新。通過多車輛的學(xué)習(xí)和完善,云端系統(tǒng)將會比人類駕駛員更熟練地處理復(fù)雜交通場景,有利于克服自主駕駛面臨的困難挑戰(zhàn)。
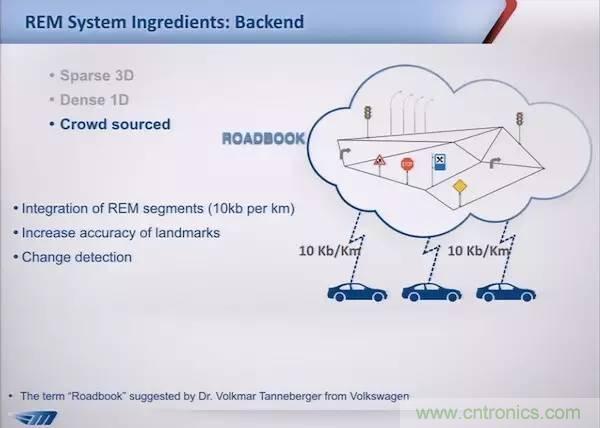
圖10.Roadbook高精度導(dǎo)航地圖
高精度地圖是實現(xiàn)自動駕駛和無人駕駛不可或缺的基礎(chǔ)支撐,許多企業(yè)開始開發(fā)定制化地圖,包括Here(奧迪寶馬和戴姆勒)發(fā)布的HDLive地圖、Mobileye發(fā)布RoadBook、TOMTOM為蘋果、Uber和Bosch提供地圖數(shù)據(jù),發(fā)布RoadDNA,大陸的RoadDB(RoadDatabase),以及車企如豐田推出的全新地圖繪制技術(shù),國內(nèi)百度、高德、四維圖新和武漢光庭等公司開發(fā)的高精度地圖等。
4、面向自動駕駛的車載集成系統(tǒng)
通過全新的面向智能車輛的架構(gòu)設(shè)計,結(jié)合集成化控制系統(tǒng)和新型總線,將傳感器和智能計算單元進(jìn)行配置和集成,將可為自動駕駛提供基礎(chǔ)架構(gòu)支撐。
4.1面向自動駕駛的新型車輛總線控制架構(gòu)
無人駕駛技術(shù)離不開車載控制系統(tǒng)的深度集成,由于車企保護(hù)做法,許多車輛總線系統(tǒng)還沒對外開放,現(xiàn)在還有許多實現(xiàn)方案是不對原車做任何改動,直接附加一套電機(jī)裝置,類似于ADAS測試中使用的ADB機(jī)器人,但這種方法安全性極低。自動駕駛車輛的執(zhí)行器改裝主要分為轉(zhuǎn)向、制動和油門改裝等部分。由于沒有車企的支持,現(xiàn)有一些自動駕駛方案中還是通過外加轉(zhuǎn)向機(jī)器人、制動機(jī)器人和油門機(jī)器人的方式來實現(xiàn)對車的控制。由于這類改裝方式,需要外部控制系統(tǒng),例如剎車采用電機(jī)拉動鋼絲繩,鋼絲繩連在剎車踏板上,剎車的反應(yīng)時間增加,可靠性和實時控制都降低,無法體現(xiàn)無人駕駛的優(yōu)勢。

設(shè)計復(fù)雜的自動駕駛機(jī)器人
而基于線控技術(shù)集成的自動駕駛系統(tǒng)將極大提高智能車輛的可靠性和操控性能。自動駕駛方案中動力、轉(zhuǎn)向和制動(部分還包括懸掛)三個系統(tǒng)需要X-by-wire線控技術(shù)。得到車企和博世等零部件供應(yīng)商支持的自動駕駛方案中,能夠通過車輛內(nèi)部CAN通信的方式實現(xiàn)對EPS、ESP等執(zhí)行機(jī)構(gòu)的準(zhǔn)確控制。此外,在純電動或者混動車基礎(chǔ)上改裝具備線控(液壓)剎車的配置,將具有很大的優(yōu)勢。
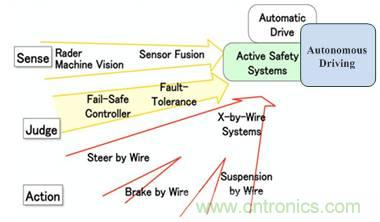
基于線控技術(shù)的自動駕駛方案
現(xiàn)階段,還需要通過一種可行的通用集成方案,將控制系統(tǒng)集成到CAN總線、Flexray或者快速以太網(wǎng)總線上。通過將決策控制信息與車輛底層控制系統(tǒng)深度集成。CAN FD 1.0作為CAN 2.0的技術(shù)升級,可以作為智能車輛車載總線的實現(xiàn)方式。此外,由于智能車輛技術(shù)發(fā)展,急需滿足更高數(shù)據(jù)帶寬的車內(nèi)連接。Tesla在車載信息服務(wù)上采用以太網(wǎng)作為總線網(wǎng)絡(luò)。例如,基于IEEE802.3bp的1000BASE-T1標(biāo)準(zhǔn)草案設(shè)計,滿足汽車系統(tǒng)嚴(yán)格的EMI要求,支持車內(nèi)傳輸多路高清視頻流。單對雙絞線以太網(wǎng)允許選擇輕量型、低成本線束。
4.2、車載高性能集成計算平臺
智能車輛一旦完成車身完整構(gòu)建,采用傳感器獲得環(huán)境感知信息,還需要能夠處理大容量數(shù)據(jù),所以處理器芯片對無人駕駛車輛同樣重要。許多移動終端產(chǎn)品芯片供應(yīng)商已經(jīng)開始為自動駕駛技術(shù)的實現(xiàn)提供圖像處理功能。由于嵌入式平臺計算能力提升,現(xiàn)在智能車輛計算平臺一般采用帶有GPU單元的嵌入式處理器來構(gòu)建。例如高通、三星也推出了車載嵌入式平臺,高通驍龍602A應(yīng)用處理器,拓展面向汽車的產(chǎn)品組合,實現(xiàn)多系統(tǒng)支持的感知功能;三星處理器芯片目前主打車機(jī)互聯(lián)系統(tǒng)、汽車智能硬件等。
在奧迪自動駕駛汽車架構(gòu)中的駕駛輔助控制器(zFAS)中的傳感器融合單元核心部件是NVIDIATegra K1平臺,極大簡化了車載計算平臺。NVIDIA的TK1有四個ARMCortex-A15核,192Kepler GPU集成CUDA,提供327GFLOPS計算性能,處理CUDA數(shù)據(jù)時功率小于6W(包括SoC和DRAM)。英偉達(dá)Drive PX無人駕駛汽車平臺的兩個Tegra X1處理器,能夠處理來自12個攝像頭的數(shù)據(jù)流,完成驅(qū)動高級駕駛員輔助功能運(yùn)行。最新的DRIVE PX 2硬件計算平臺,支持12路攝像頭輸入、激光定位、雷達(dá)和超聲波傳感器;包括兩顆新一代NVIDIA Tegra處理器,其中包括8個A57核心和4個Denver核心;基于NVIDIA的新一代GPU架構(gòu)Pascal設(shè)計,單精度計算能力達(dá)到8TFlops,超越TITAN X的10倍以上的深度學(xué)習(xí)計算能力。

NVIDIA DRIVE PX 2自動駕駛開發(fā)平臺
NVIDIA開發(fā)網(wǎng)提供算法庫支持,有助于加速開發(fā)。NVIDIA建造NvidiaPX2構(gòu)建的Drivenet平臺,已在自動駕駛車輛上進(jìn)行測試。能夠?qū)⑼獠總鞲衅鳙@取的圖像數(shù)據(jù)處理后形成高精度點(diǎn)云,并上傳至云端服務(wù)器,經(jīng)過更高性能的基于DGX-1的服務(wù)器處理后,融合成完整高精度地圖。車載計算平臺和云端服務(wù)器形成NVIDIA完整的自動駕駛技術(shù)平臺解決方案。
流行的深度學(xué)習(xí)框架如Caffe、Theano、Torch推出CUDA工具庫,大幅提高圖像識別準(zhǔn)確率,讓車載計算平臺擁有更強(qiáng)的數(shù)據(jù)處理能力,通過運(yùn)行深度學(xué)習(xí)算法來加強(qiáng)車輛感知能力,對車載各類傳感器數(shù)據(jù)進(jìn)行處理與分析,進(jìn)行駕駛決策。

深度學(xué)習(xí)的車載嵌入式計算平臺
5、結(jié)語
智能車輛研發(fā)已經(jīng)進(jìn)入關(guān)鍵節(jié)點(diǎn),其技術(shù)突破的難點(diǎn)已經(jīng)從算法研究轉(zhuǎn)移到了面向自動駕駛的車載傳感器、車輛總體架構(gòu)設(shè)計、智能計算平臺集成等實用化技術(shù)上。本文結(jié)合多年的智能車研發(fā)經(jīng)歷,聚焦在環(huán)境感知技術(shù)及車載傳感器、車輛系統(tǒng)集成、V2X和車聯(lián)網(wǎng)、高精度定位和地圖技術(shù)、深度學(xué)習(xí)和計算平臺等方面上,針對這些可能的突破點(diǎn)進(jìn)行探討,其中內(nèi)容可作為智能車輛研發(fā)的參考。
【作者簡介:黃武陵,中國科學(xué)院自動化研究所副研究員,中國科學(xué)院大學(xué)博士,主要從事智能車輛研究,參與和主持了多項國家863和973、交通部和自然基金課題,發(fā)表SCI/EI論文十多篇,申請和獲得發(fā)明專利二十多項。獲北京市科技進(jìn)步獎、北京市“金橋工程”項目獎、吳文俊人工智能科學(xué)技術(shù)進(jìn)步獎、中科院教學(xué)成果獎等獎勵。】
參考資料: [1] en.wikipedia.org/wiki/ [2] 新智元公眾號 [3] http://www.cheyun.com [4] www.nvidia.com/object/drive-px.html [5] Jaycil Z. Varghese, Overview of Autonomous Vehicle Sensors and Systems,Proceedings of the 2015 International Conference on Operations Excellenceand Service Engineering [6] Junior: The Stanford Entry in the Urban Challenge, Michael Montemerlo,Jan Becker, .., and Sebastian Thrun. 2008. Junior: The Stanford entry in theUrban Challenge. J. Field Robot. 25, 9 (September 2008), 569-597. [7] C. Urmson, J. Anhalt, D. Bagnell,., , “Autonomous driving in urbanenvironments: Boss and the urban challenge,” J. Field Robot.,vol. 25, no. 1,pp. 425–466, Jun. 2008. [8] W. Huang, D. Wen, J. Geng, N.-N. Zheng, "Task-Specific performanceevaluation of UGVs: Case studies at the IVFC," IEEE Transactions on Intelligent Transportation Systems, vol. 15,no. 5, pp. 1969-1979, 2014. [9] 黃武陵. 無人駕駛汽車帶來的交通便利[J].單片機(jī)與嵌入式系統(tǒng)應(yīng)用,2016,16(6):6-8. [10] 黃武陵.智能車輛環(huán)境感知技術(shù)與平臺構(gòu)建[J].單片機(jī)與嵌入式系統(tǒng)應(yīng)用,2016,(7). [11] 黃武陵.智能車輛的道路檢測及其應(yīng)用[J].單片機(jī)與嵌入式系統(tǒng)應(yīng)用,2016,(8).
推薦閱讀:



