

【導(dǎo)讀】能量采集允許智能傳感器部署在先前不可能部署的更廣泛情況中,是實(shí)現(xiàn)新一代設(shè)備的關(guān)鍵。這類傳感器可以進(jìn)行連續(xù)的狀態(tài)監(jiān)測,能夠用于林林總總不同的應(yīng)用中,比如工業(yè)馬達(dá),以至穿戴在身體上的長期健康測量裝置。
雖然這些系統(tǒng)可以使用電池供電,所以不需要將傳感器與主電源連接,但是仍然需要更換電池或充電。一旦放置在大型馬達(dá)或渦輪機(jī)附近,便很難觸及和更換電池。不過,許多這些應(yīng)用的優(yōu)點(diǎn)是它們可以自己提供能量,自給自足。
只要通過合適的地震量(慣性質(zhì)量)和轉(zhuǎn)換器,便可利用工業(yè)馬達(dá)的振動為監(jiān)測它的系統(tǒng)提供能量。穿戴在身體上的傳感器的情況類似,采集到的振動和熱能可以使得電荷呈涓流形式進(jìn)入電容器內(nèi),用于傳感器供電(圖1)。
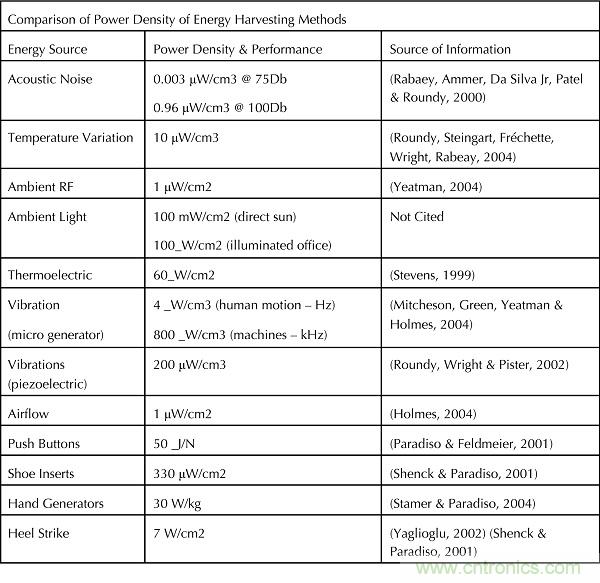
圖1:各種能量采集方法的功率密度(來源:技術(shù)研究雜志)
雖然這些系統(tǒng)提供了采集能量的機(jī)制,但是它們很少能夠達(dá)到設(shè)計(jì)人員習(xí)慣使用的電池供電系統(tǒng)的功率水平。因此,設(shè)計(jì)一種功率消耗盡可能低的系統(tǒng)是至關(guān)重要的。
降低邏輯電路功率的關(guān)鍵目標(biāo)是供電電壓。在CMOS電路中,電壓和功耗之間呈平方關(guān)系,如公式P = CV2f所示,其中C是電路電容,f是開關(guān)頻率,V是施加的電壓。從中可以明顯看出,降低電壓可以最大可能地降低功耗。晶體管近閾值和亞閾值運(yùn)作提供了一種獨(dú)特方法,可以將微控制器和其它邏輯電路的供電電壓降低到遠(yuǎn)低于標(biāo)準(zhǔn)邏輯電路要求的水平。
近閾值和亞閾值運(yùn)作的背后原理,就是器件通常被認(rèn)為“開啟”的閾值電壓其實(shí)并不需要視為邏輯和模擬電路的目標(biāo)。為了給伴隨每個柵極的電容路徑充電,邏輯晶體管傳統(tǒng)上被設(shè)計(jì)為飽和時通過高電流水平;但是,給這些電路路徑充電時,可以不將晶體管開關(guān)到完全飽和狀態(tài),而是允許電流更為緩慢地涓涓流過。這樣的結(jié)果是開關(guān)邏輯狀態(tài)會變得緩慢,但是,在典型傳感器應(yīng)用中,其實(shí)不需要以最高可能速度進(jìn)行開關(guān)。
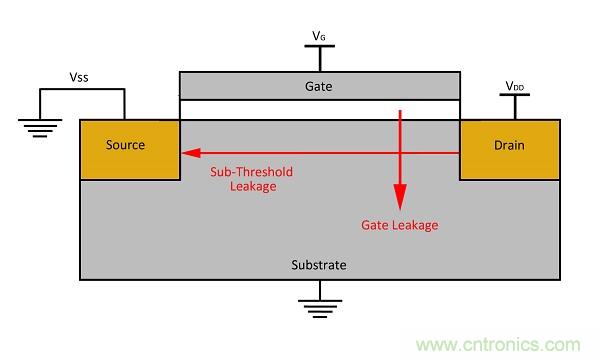
然而,由于閾值電壓在更低水平驅(qū)動,所以晶體管泄漏電流呈指數(shù)級增加(圖2)。
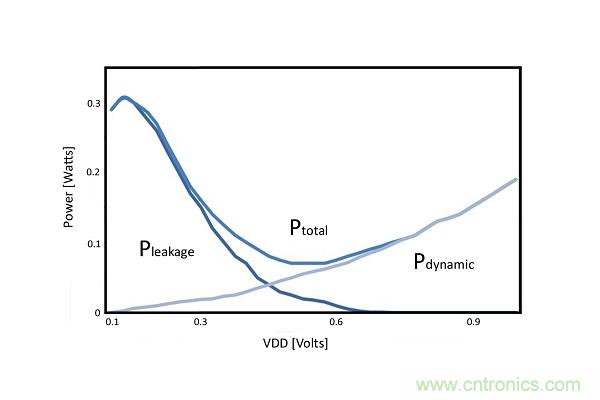
當(dāng)電壓進(jìn)一步下降到深度亞閾值范圍時,泄漏損失的能量比例將占優(yōu)勢,除了性能考慮,還引致考慮供電電壓能夠降低到什么程度的次級限制(圖3)。
對亞閾值電路設(shè)計(jì)人員來說,關(guān)鍵問題是在供電電壓接近閾值時的過程變化和其影響。有效設(shè)計(jì)亞閾值電路的關(guān)鍵,就是降低這種變化的影響的機(jī)制,例如專為克服這種變化而設(shè)計(jì)的適應(yīng)性電路。美國密歇根大學(xué)和Ambiq Micro進(jìn)行了多年研究,帶來了這種技術(shù)等多項(xiàng)亞閾值技術(shù)創(chuàng)新。為了有效地利用這項(xiàng)技術(shù),還必須對整個設(shè)計(jì)流程進(jìn)行重新設(shè)計(jì),包括從實(shí)施亞閾值邏輯電路的標(biāo)準(zhǔn)元件庫直到測定納安和皮安電流的測試策略。只有通過這種投資水平,才可能最大限度地提高亞閾值設(shè)計(jì)的節(jié)能效益。
雖然亞閾值運(yùn)作最大程度地利用了電壓和功耗之間的平方關(guān)系,但是,它并非在所有情況下也是最適合的晶體管運(yùn)作方案選擇。由于亞閾值運(yùn)作的性能影響,它對近閾值甚至傳統(tǒng)超閾值方案等使用較高電壓的電路有益處。例如,存儲塊在存取時不一定能夠從超低電壓運(yùn)作中受益。
在設(shè)計(jì)節(jié)能微控制器時,重要的是在電路水平方面分析電壓、功率和性能之間的折衷權(quán)衡。這項(xiàng)工作已經(jīng)在Apollo系列微控制器的核心Ambiq亞閾值功率優(yōu)化技術(shù)(SPOT)平臺上進(jìn)行了廣泛的實(shí)施。
雖然電路水平設(shè)計(jì)選擇將在優(yōu)化能量采集功率物聯(lián)網(wǎng)(IoT)應(yīng)用中發(fā)揮作用,但是,系統(tǒng)級的決策對于總能耗也有著十分重大的影響。關(guān)鍵舉措是盡可能減少不必要的活動,這通常使用智能應(yīng)用的睡眠模式來實(shí)現(xiàn)。采用最大限度地提高每個時鐘周期所執(zhí)行工作量的處理器架構(gòu),還可以實(shí)現(xiàn)進(jìn)一步的提升?!?/div>
推薦閱讀:
微控制器通常具有不止一個低功耗睡眠模式,從局部存儲器和大多數(shù)外設(shè)保持供電但CPU內(nèi)核本身待機(jī)的輕度睡眠模式,直到大多數(shù)功能禁用和掉電的深度睡眠模式。由于越來越少的外設(shè)和內(nèi)核功能保持啟用,因此增加了節(jié)省的能量。但是,這種設(shè)計(jì)存在重大的折衷。
一般說來,IoT傳感器節(jié)點(diǎn)需要對其周圍的環(huán)境進(jìn)行監(jiān)測,并在系統(tǒng)條件發(fā)生變化時做出反應(yīng)。對于低功耗嵌入式系統(tǒng),特別是在采用能量采集系統(tǒng)時依賴間歇電源的嵌入式系統(tǒng)來說,優(yōu)化的關(guān)鍵就是找到仍然能夠?qū)?shí)時事件做出適當(dāng)反應(yīng)的最低功耗睡眠模式。
在實(shí)際系統(tǒng)中的微控制器最低能量睡眠模式,一般是由實(shí)時時鐘處理基本的內(nèi)務(wù)管理功能,并且定期喚醒系統(tǒng)來檢查活動。例如每秒喚醒系統(tǒng)以檢查外部條件的變化,如果需要軟件處理輸入的話,便轉(zhuǎn)而完全喚醒處理器內(nèi)核。但是,在報(bào)警情況相當(dāng)少,而且間隔并不均勻的系統(tǒng)中,這種輪詢式方法是非常浪費(fèi)的。
如果讓系統(tǒng)使用較高能量的睡眠狀態(tài)來處理I/O,一旦超過閾值便可以快速喚醒處理器內(nèi)核,從而確保對隨機(jī)中斷做出更快的響應(yīng);但是這些模式可能消耗能量庫,使得處理器沒有足夠的功率來響應(yīng)。但是,我們有可能可以結(jié)合深度睡眠模式的長處,而仍然對關(guān)鍵輸入作出快速響應(yīng)。
有些超低能量實(shí)時時鐘設(shè)計(jì)可以檢測外部事件,例如硬件中斷引起的問題或比較器感測到的輸入電壓變化。當(dāng)檢測到外部事件時,系統(tǒng)可迅速轉(zhuǎn)向喚醒狀態(tài),不會因?yàn)閳?zhí)行輪詢策略而引起功率損失,并且最大限度地延長了系統(tǒng)處于深度睡眠模式的時間。
在處理軟件時,重要的是確保每個時鐘周期可以實(shí)現(xiàn)最高工作量。在傳遞給用戶與/或云端之前,許多IoT傳感器應(yīng)用需要使用信號處理算法來檢測問題和預(yù)處理數(shù)據(jù)。這不僅要求使用32位處理器架構(gòu)而不是8位處理器架構(gòu)(因?yàn)?2位處理器只需更少的周期便可處理這些數(shù)學(xué)運(yùn)算),而且要求采用全面支持定點(diǎn)和浮點(diǎn)信號處理指令的架構(gòu)。用于浮點(diǎn)運(yùn)算的硬件支持,可以確保在減少很多的周期內(nèi)完成運(yùn)算,從而允許內(nèi)核快速返回到更節(jié)能的睡眠狀態(tài),進(jìn)一步降低總體系統(tǒng)級能耗。這種要求組合需要選擇ARM Cortex-M4F這樣的處理器,也就是Ambiq Apollo系列所采用的處理器。
由于能效提升從系統(tǒng)級降低到低電壓水平的電路運(yùn)作,將電壓控制推動到極限,使得能量采集能夠成為物聯(lián)網(wǎng)日益廣泛的傳感器設(shè)計(jì)的可行選擇。
推薦閱讀:



