
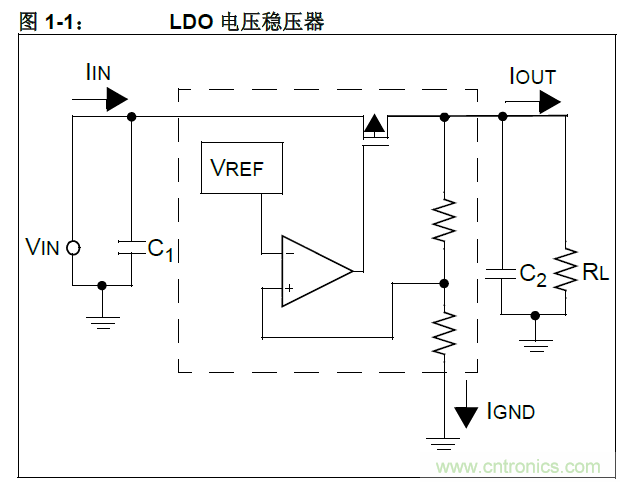
【導(dǎo)讀】標(biāo)準(zhǔn)三端線性穩(wěn)壓器的壓差通常是 2.0-3.0V。要把 5V 可靠地轉(zhuǎn)換為 3.3V,就不能使用它們。壓差為幾百個(gè)毫伏的低壓降 (Low Dropout, LDO)穩(wěn)壓器,是此類應(yīng)用的理想選擇。圖 1-1 是基本LDO 系統(tǒng)的框圖,標(biāo)注了相應(yīng)的電流。從圖中可以看出, LDO 由四個(gè)主要部分組成:
技巧一:使用LDO穩(wěn)壓器,從5V電源向3.3V系統(tǒng)供電
標(biāo)準(zhǔn)三端線性穩(wěn)壓器的壓差通常是 2.0-3.0V。要把 5V 可靠地轉(zhuǎn)換為 3.3V,就不能使用它們。壓差為幾百個(gè)毫伏的低壓降 (Low Dropout, LDO)穩(wěn)壓器,是此類應(yīng)用的理想選擇。圖 1-1 是基本LDO 系統(tǒng)的框圖,標(biāo)注了相應(yīng)的電流。從圖中可以看出, LDO 由四個(gè)主要部分組成:
1. 導(dǎo)通晶體管
2. 帶隙參考源
3. 運(yùn)算放大器
4. 反饋電阻分壓器
在選擇 LDO 時(shí),重要的是要知道如何區(qū)分各種LDO。器件的靜態(tài)電流、封裝大小和型號(hào)是重要的器件參數(shù)。根據(jù)具體應(yīng)用來(lái)確定各種參數(shù),將會(huì)得到最優(yōu)的設(shè)計(jì)。
LDO的靜態(tài)電流IQ是器件空載工作時(shí)器件的接地電流 IGND。IGND 是 LDO 用來(lái)進(jìn)行穩(wěn)壓的電流。當(dāng)IOUT>>IQ 時(shí), LDO 的效率可用輸出電壓除以輸入電壓來(lái)近似地得到。然而,輕載時(shí),必須將 IQ 計(jì)入效率計(jì)算中。具有較低 IQ 的 LDO 其輕載效率較高。輕載效率的提高對(duì)于 LDO 性能有負(fù)面影響。靜態(tài)電流較高的 LDO 對(duì)于線路和負(fù)載的突然變化有更快的響應(yīng)。
技巧二:采用齊納二極管的低成本供電系統(tǒng)
這里詳細(xì)說(shuō)明了一個(gè)采用齊納二極管的低成本穩(wěn)壓器方案。
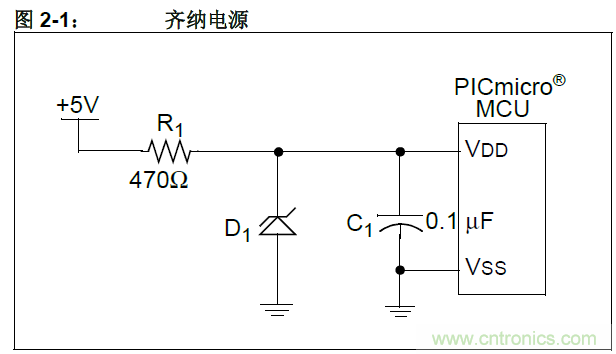
可以用齊納二極管和電阻做成簡(jiǎn)單的低成本 3.3V穩(wěn)壓器,如圖 2-1 所示。在很多應(yīng)用中,該電路可以替代 LDO 穩(wěn)壓器并具成本效益。但是,這種穩(wěn)壓器對(duì)負(fù)載敏感的程度要高于 LDO 穩(wěn)壓器。另外,它的能效較低,因?yàn)?R1 和 D1 始終有功耗。R1 限制流入D1 和 PICmicro® MCU的電流,從而使VDD 保持在允許范圍內(nèi)。由于流經(jīng)齊納二極管的電流變化時(shí),二極管的反向電壓也將發(fā)生改變,所以需要仔細(xì)考慮 R1 的值。
R1 的選擇依據(jù)是:在最大負(fù)載時(shí)——通常是在PICmicro MCU 運(yùn)行且驅(qū)動(dòng)其輸出為高電平時(shí)——R1上的電壓降要足夠低從而使PICmicro MCU有足以維持工作所需的電壓。同時(shí),在最小負(fù)載時(shí)——通常是 PICmicro MCU 復(fù)位時(shí)——VDD 不超過(guò)齊納二極管的額定功率,也不超過(guò) PICmicro MCU的最大 VDD。
技巧三:采用3個(gè)整流二極管的更低成本供電系統(tǒng)
圖 3-1 詳細(xì)說(shuō)明了一個(gè)采用 3 個(gè)整流二極管的更低成本穩(wěn)壓器方案。
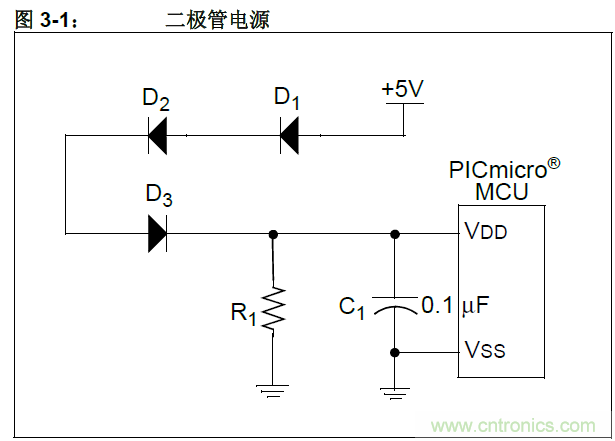
我們也可以把幾個(gè)常規(guī)開關(guān)二極管串聯(lián)起來(lái),用其正向壓降來(lái)降低進(jìn)入的 PICmicro MCU 的電壓。這甚至比齊納二極管穩(wěn)壓器的成本還要低。這種設(shè)計(jì)的電流消耗通常要比使用齊納二極管的電路低。
所需二極管的數(shù)量根據(jù)所選用二極管的正向電壓而變化。二極管 D1-D3 的電壓降是流經(jīng)這些二極管的電流的函數(shù)。連接 R1 是為了避免在負(fù)載最小時(shí)——通常是 PICmicro MCU 處于復(fù)位或休眠狀態(tài)時(shí)——PICmicro MCU VDD 引腳上的電壓超過(guò)PICmicro MCU 的最大 VDD 值。根據(jù)其他連接至VDD 的電路,可以提高R1 的阻值,甚至也可能完全不需要 R1。二極管 D1-D3 的選擇依據(jù)是:在最大負(fù)載時(shí)——通常是 PICmicro MCU 運(yùn)行且驅(qū)動(dòng)其輸出為高電平時(shí)——D1-D3 上的電壓降要足夠低從而能夠滿足 PICmicro MCU 的最低 VDD 要求。
技巧四:使用開關(guān)穩(wěn)壓器,從5V電源向3.3V系統(tǒng)供電
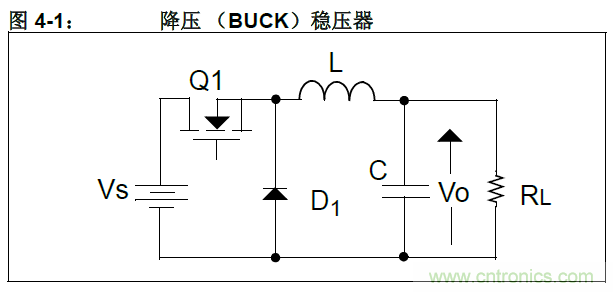
如圖 4-1 所示,降壓開關(guān)穩(wěn)壓器是一種基于電感的轉(zhuǎn)換器,用來(lái)把輸入電壓源降低至幅值較低的輸出電壓。輸出穩(wěn)壓是通過(guò)控制 MOSFET Q1 的導(dǎo)通(ON)時(shí)間來(lái)實(shí)現(xiàn)的。由于 MOSFET 要么處于低阻狀態(tài),要么處于高阻狀態(tài) (分別為 ON 和OFF),因此高輸入源電壓能夠高效率地轉(zhuǎn)換成較低的輸出電壓。
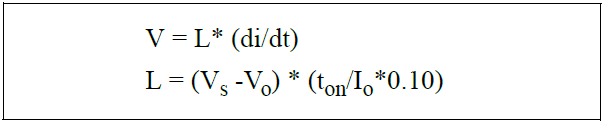
當(dāng) Q1 在這兩種狀態(tài)期間時(shí),通過(guò)平衡電感的電壓- 時(shí)間,可以建立輸入和輸出電壓之間的關(guān)系。
對(duì)于 MOSFET Q1,有下式:

在選擇電感的值時(shí),使電感的最大峰 - 峰紋波電流等于最大負(fù)載電流的百分之十的電感值,是個(gè)很好的初始選擇。
在選擇輸出電容值時(shí),好的初值是:使 LC 濾波器特性阻抗等于負(fù)載電阻。這樣在滿載工作期間如果突然卸掉負(fù)載,電壓過(guò)沖能處于可接受范圍之內(nèi)。

在選擇二極管 D1 時(shí),應(yīng)選擇額定電流足夠大的元件,使之能夠承受脈沖周期 (IL)放電期間的電感電流。
數(shù)字連接
在連接兩個(gè)工作電壓不同的器件時(shí),必須要知道其各自的輸出、輸入閾值。知道閾值之后,可根據(jù)應(yīng)用的其他需求選擇器件的連接方法。表 4-1 是本文檔所使用的輸出、輸入閾值。在設(shè)計(jì)連接時(shí),請(qǐng)務(wù)必參考制造商的數(shù)據(jù)手冊(cè)以獲得實(shí)際的閾值電平。

技巧五:3.3V →5V直接連接
將 3.3V 輸出連接到 5V 輸入最簡(jiǎn)單、最理想的方法是直接連接。直接連接需要滿足以下 2 點(diǎn)要求:
• 3.3V輸出的 VOH 大于 5V 輸入的 VIH
• 3.3V輸出的 VOL 小于 5V 輸入的 VIL
能夠使用這種方法的例子之一是將 3.3V LVCMOS輸出連接到 5V TTL 輸入。從表 4-1 中所給出的值可以清楚地看到上述要求均滿足。
3.3V LVCMOS 的 VOH (3.0V)大于 5V TTL 的VIH (2.0V)且3.3V LVCMOS 的 VOL (0.5V)小于 5V TTL 的VIL (0.8V)。
如果這兩個(gè)要求得不到滿足,連接兩個(gè)部分時(shí)就需要額外的電路??赡艿慕鉀Q方案請(qǐng)參閱技巧 6、7、 8 和 13。
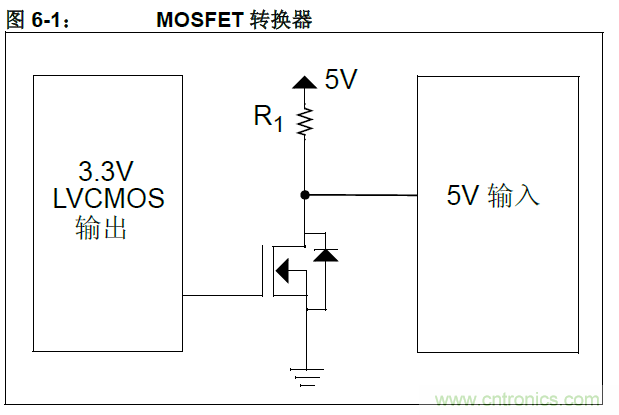
技巧六:3.3V→5V使用MOSFET轉(zhuǎn)換器
如果 5V 輸入的 VIH 比 3.3V CMOS 器件的 VOH 要高,則驅(qū)動(dòng)任何這樣的 5V 輸入就需要額外的電路。圖 6-1 所示為低成本的雙元件解決方案。
在選擇 R1 的阻值時(shí),需要考慮兩個(gè)參數(shù),即:輸入的開關(guān)速度和 R1 上的電流消耗。當(dāng)把輸入從 0切換到 1 時(shí),需要計(jì)入因 R1 形成的 RC 時(shí)間常數(shù)而導(dǎo)致的輸入上升時(shí)間、 5V 輸入的輸入容抗以及電路板上任何的雜散電容。輸入開關(guān)速度可通過(guò)下式計(jì)算:

由于輸入容抗和電路板上的雜散電容是固定的,提高輸入開關(guān)速度的惟一途徑是降低 R1 的阻值。而降低 R1 阻值以獲取更短的開關(guān)時(shí)間,卻是以增大5V 輸入為低電平時(shí)的電流消耗為代價(jià)的。通常,切換到 0 要比切換到 1 的速度快得多,因?yàn)?N 溝道 MOSFET 的導(dǎo)通電阻要遠(yuǎn)小于 R1。另外,在選擇 N 溝道 FET 時(shí),所選 FET 的 VGS 應(yīng)低于3.3V 輸出的 VOH。
技巧七:3.3V→5V使用二極管補(bǔ)償
表 7-1 列出了 5V CMOS 的輸入電壓閾值、 3.3VLVTTL 和 LVCMOS 的輸出驅(qū)動(dòng)電壓。
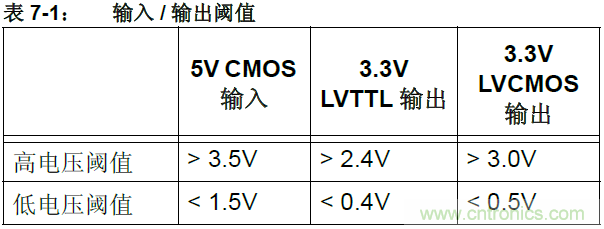
從上表看出, 5V CMOS 輸入的高、低輸入電壓閾值均比 3.3V 輸出的閾值高約一伏。因此,即使來(lái)自 3.3V 系統(tǒng)的輸出能夠被補(bǔ)償,留給噪聲或元件容差的余地也很小或者沒(méi)有。我們需要的是能夠補(bǔ)償輸出并加大高低輸出電壓差的電路。
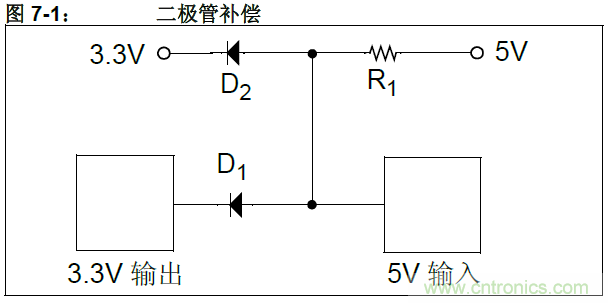
輸出電壓規(guī)范確定后,就已經(jīng)假定:高輸出驅(qū)動(dòng)的是輸出和地之間的負(fù)載,而低輸出驅(qū)動(dòng)的是 3.3V和輸出之間的負(fù)載。如果高電壓閾值的負(fù)載實(shí)際上是在輸出和 3.3V 之間的話,那么輸出電壓實(shí)際上要高得多,因?yàn)槔咻敵龅臋C(jī)制是負(fù)載電阻,而不是輸出三極管。
如果我們?cè)O(shè)計(jì)一個(gè)二極管補(bǔ)償電路 (見圖 7-1),二極管 D1 的正向電壓 (典型值 0.7V)將會(huì)使輸出低電壓上升,在 5V CMOS 輸入得到 1.1V 至1.2V 的低電壓。它安全地處于 5V CMOS 輸入的低輸入電壓閾值之下。輸出高電壓由上拉電阻和連至3.3V 電源的二極管 D2 確定。這使得輸出高電壓大約比 3.3V 電源高 0.7V,也就是 4.0 到 4.1V,很安全地在 5V CMOS 輸入閾值 (3.5V)之上。
注:為了使電路工作正常,上拉電阻必須顯著小于 5V CMOS 輸入的輸入電阻,從而避免由于輸入端電阻分壓器效應(yīng)而導(dǎo)致的輸出電壓下降。上拉電阻還必須足夠大,從而確保加載在 3.3V 輸出上的電流在器件規(guī)范之內(nèi)。
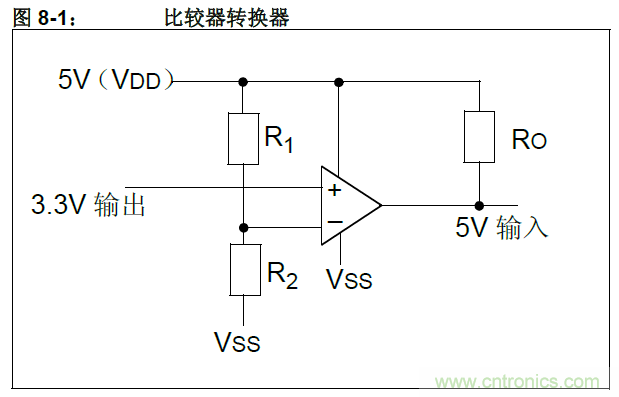
技巧八:3.3V→5V使用電壓比較器
比較器的基本工作如下:
• 反相 (-)輸入電壓大于同相 (+)輸入電壓時(shí),比較器輸出切換到 Vss。
• 同相 (+)輸入端電壓大于反相 (-)輸入電壓時(shí),比較器輸出為高電平。
為了保持 3.3V 輸出的極性, 3.3V 輸出必須連接到比較器的同相輸入端。比較器的反相輸入連接到由 R1 和 R2 確定的參考電壓處,如圖 8-1 所示。
計(jì)算 R1 和 R2
R1 和 R2 之比取決于輸入信號(hào)的邏輯電平。對(duì)于3.3V 輸出,反相電壓應(yīng)該置于VOL 與VOH之間的中點(diǎn)電壓。對(duì)于 LVCMOS 輸出,中點(diǎn)電壓為:

如果 R1 和 R2 的邏輯電平關(guān)系如下,

若 R2 取值為 1K,則 R1 為 1.8K。
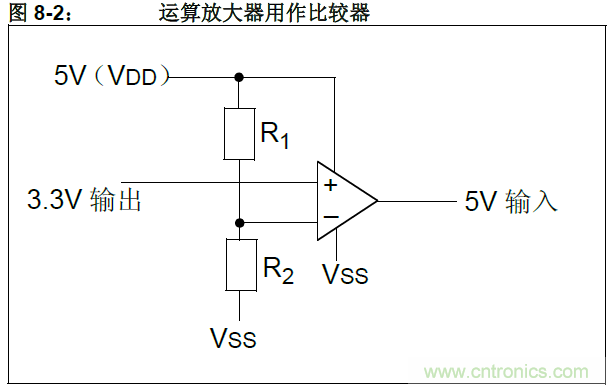
經(jīng)過(guò)適當(dāng)連接后的運(yùn)算放大器可以用作比較器,以將 3.3V 輸入信號(hào)轉(zhuǎn)換為 5V 輸出信號(hào)。這是利用了比較器的特性,即:根據(jù) “反相”輸入與 “同相”輸入之間的壓差幅值,比較器迫使輸出為高(VDD)或低 (Vss)電平。
注:要使運(yùn)算放大器在 5V 供電下正常工作,輸出必須具有軌到軌驅(qū)動(dòng)能力。
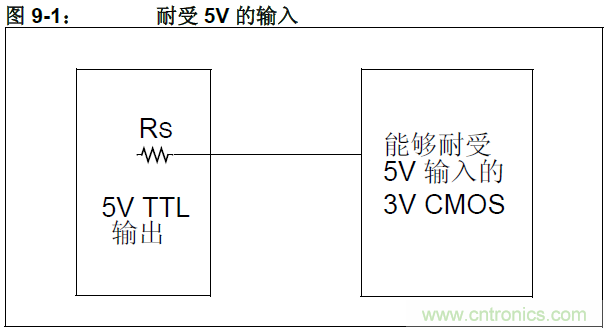
技巧九:5V→3.3V直接連接
通常 5V 輸出的 VOH 為 4.7 伏, VOL 為 0.4 伏;而通常 3.3V LVCMOS 輸入的 VIH 為 0.7 x VDD, VIL為 0.2 x VDD。
當(dāng) 5V 輸出驅(qū)動(dòng)為低時(shí),不會(huì)有問(wèn)題,因?yàn)?0.4 伏的輸出小于 0.8 伏的輸入閾值。當(dāng) 5V 輸出為高時(shí), 4.7 伏的 VOH 大于 2.1 伏 VIH,所以,我們可以直接把兩個(gè)引腳相連,不會(huì)有沖突,前提是3.3V CMOS 輸出能夠耐受 5 伏電壓。
如果 3.3V CMOS 輸入不能耐受 5 伏電壓,則將出現(xiàn)問(wèn)題,因?yàn)槌隽溯斎氲淖畲箅妷阂?guī)范??赡艿慕鉀Q方案請(qǐng)參見技巧 10-13。
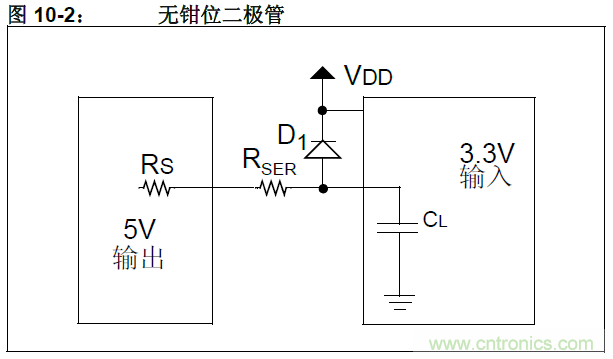
技巧十:5V→3.3V使用二極管鉗位
很多廠商都使用鉗位二極管來(lái)保護(hù)器件的 I/O 引腳,防止引腳上的電壓超過(guò)最大允許電壓規(guī)范。鉗位二極管使引腳上的電壓不會(huì)低于 Vss 超過(guò)一個(gè)二極管壓降,也不會(huì)高于 VDD 超過(guò)一個(gè)二極管壓降。要使用鉗位二極管來(lái)保護(hù)輸入,仍然要關(guān)注流經(jīng)鉗位二極管的電流。流經(jīng)鉗位二極管的電流應(yīng)該始終比較小 (在微安數(shù)量級(jí)上)。如果流經(jīng)鉗位二極管的電流過(guò)大,就存在部件閉鎖的危險(xiǎn)。由于5V 輸出的源電阻通常在 10Ω 左右,因此仍需串聯(lián)一個(gè)電阻,限制流經(jīng)鉗位二極管的電流,如圖 10-1所示。使用串聯(lián)電阻的后果是降低了輸入開關(guān)的速度,因?yàn)橐_ (CL)上構(gòu)成了 RC 時(shí)間常數(shù)。
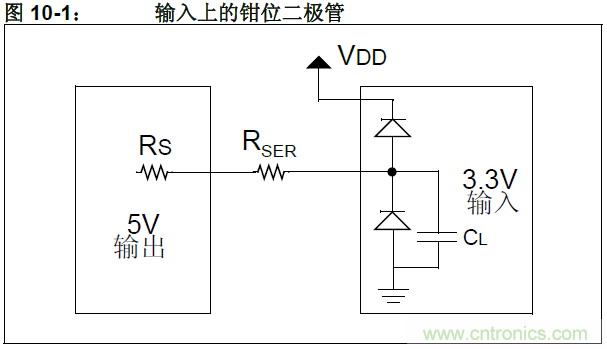
如果沒(méi)有鉗位二極管,可以在電流中添加一個(gè)外部二極管,如圖 10-2 所示。
技巧十一:5V→3.3V有源鉗位
使用二極管鉗位有一個(gè)問(wèn)題,即它將向 3.3V 電源注入電流。在具有高電流 5V 輸出且輕載 3.3V 電源軌的設(shè)計(jì)中,這種電流注入可能會(huì)使 3.3V 電源電壓超過(guò) 3.3V。為了避免這個(gè)問(wèn)題,可以用一個(gè)三極管來(lái)替代,三極管使過(guò)量的輸出驅(qū)動(dòng)電流流向地,而不是 3.3V 電源。設(shè)計(jì)的電路如圖 11-1 所示。
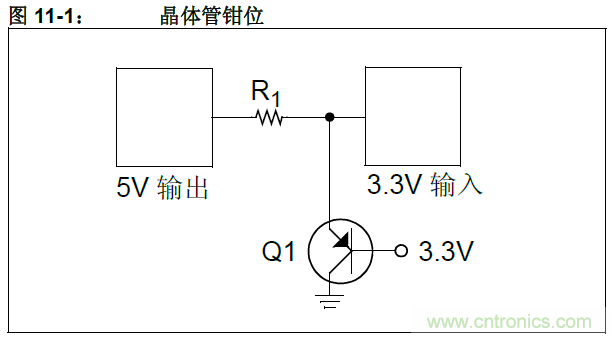
Q1的基極-發(fā)射極結(jié)所起的作用與二極管鉗位電路中的二極管相同。區(qū)別在于,發(fā)射極電流只有百分之幾流出基極進(jìn)入 3.3V 軌,絕大部分電流都流向集電極,再?gòu)募姌O無(wú)害地流入地。基極電流與集電極電流之比,由晶體管的電流增益決定,通常為10-400,取決于所使用的晶體管。
技巧十二:5V→3.3V電阻分壓器
可以使用簡(jiǎn)單的電阻分壓器將 5V 器件的輸出降低到適用于 3.3V 器件輸入的電平。這種接口的等效電路如圖 12-1 所示。
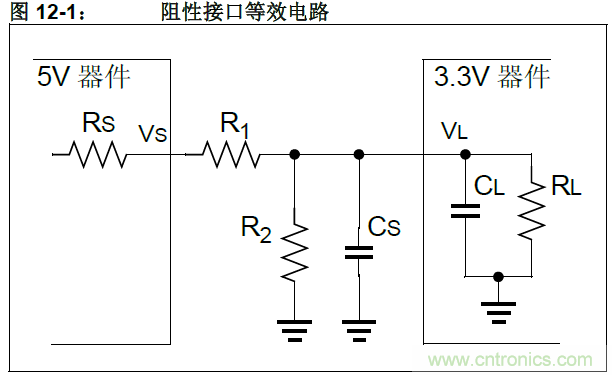
通常,源電阻 RS 非常小 (小于 10Ω),如果選擇的 R1 遠(yuǎn)大于 RS 的話,那么可以忽略 RS 對(duì) R1 的影響。在接收端,負(fù)載電阻 RL 非常大 (大于500 kΩ),如果選擇的R2遠(yuǎn)小于RL的話,那么可以忽略 RL 對(duì) R2 的影響。
在功耗和瞬態(tài)時(shí)間之間存在取舍權(quán)衡。為了使接口電流的功耗需求最小,串聯(lián)電阻 R1 和 R2 應(yīng)盡可能大。但是,負(fù)載電容 (由雜散電容 CS 和 3.3V 器件的輸入電容 CL 合成)可能會(huì)對(duì)輸入信號(hào)的上升和下降時(shí)間產(chǎn)生不利影響。如果 R1 和 R2 過(guò)大,上升和下降時(shí)間可能會(huì)過(guò)長(zhǎng)而無(wú)法接受。
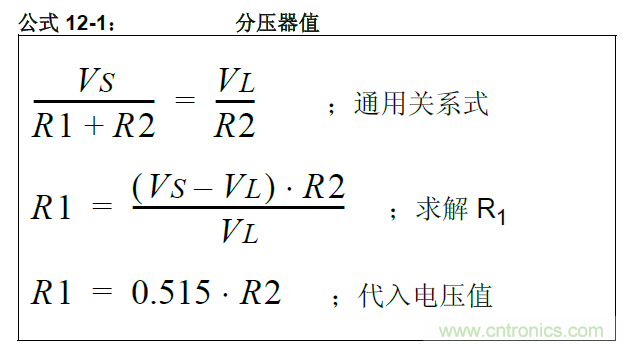
如果忽略 RS 和 RL 的影響,則確定 R1 和 R2 的式子由下面的公式 12-1 給出。
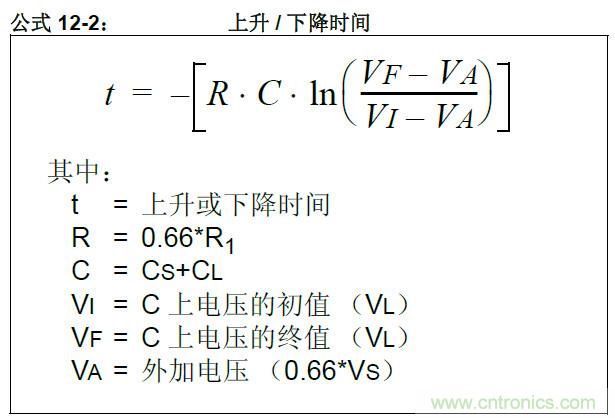
公式 12-2 給出了確定上升和下降時(shí)間的公式。為便于電路分析,使用戴維寧等效計(jì)算來(lái)確定外加電壓 VA 和串聯(lián)電阻 R。戴維寧等效計(jì)算定義為開路電壓除以短路電流。根據(jù)公式 12-2 所施加的限制,對(duì)于圖 12-1 所示電路,確定的戴維寧等效電阻 R 應(yīng)為 0.66*R1,戴維寧等效電壓 VA 應(yīng)為0.66*VS。
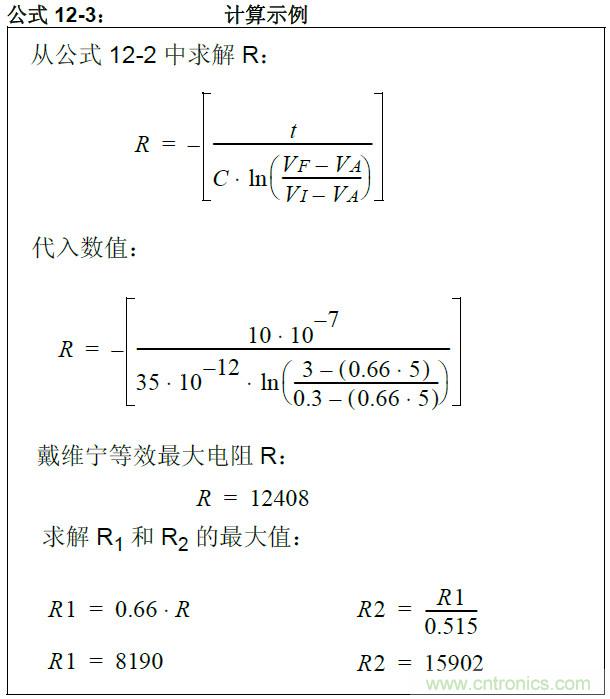
例如,假設(shè)有下列條件存在:
• 雜散電容 = 30 pF
• 負(fù)載電容 = 5 pF
• 從 0.3V 至 3V 的最大上升時(shí)間 ≤ 1 μs
• 外加源電壓 Vs = 5V
確定最大電阻的計(jì)算如公式 12-3 所示。
技巧十三:3.3V→5V電平轉(zhuǎn)換器
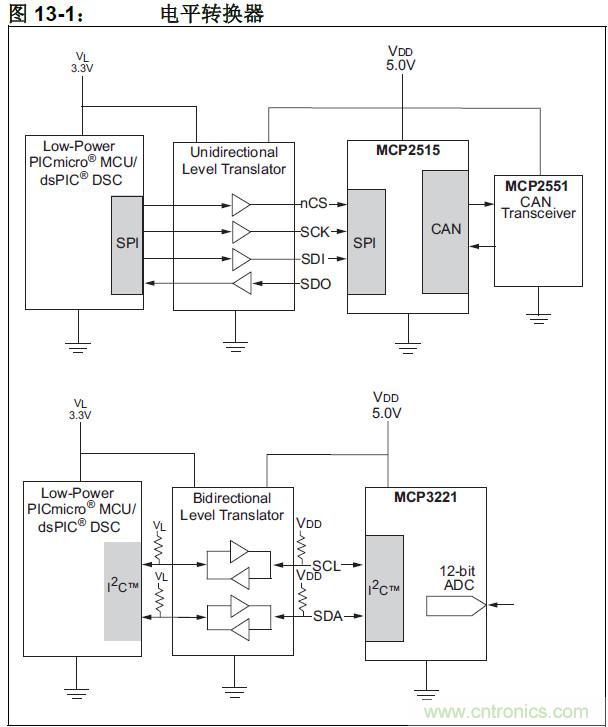
盡管電平轉(zhuǎn)換可以分立地進(jìn)行,但通常使用集成解決方案較受歡迎。電平轉(zhuǎn)換器的使用范圍比較廣泛:有單向和雙向配置、不同的電壓轉(zhuǎn)換和不同的速度,供用戶選擇最佳的解決方案。
器件之間的板級(jí)通訊 (例如, MCU 至外設(shè))通過(guò) SPI 或 I2C™ 來(lái)進(jìn)行,這是最常見的。對(duì)于SPI,使用單向電平轉(zhuǎn)換器比較合適;對(duì)于 I2C,就需要使用雙向解決方案。下面的圖 13-1 顯示了這兩種解決方案。
模擬
3.3V 至 5V 接口的最后一項(xiàng)挑戰(zhàn)是如何轉(zhuǎn)換模擬信號(hào),使之跨越電源障礙。低電平信號(hào)可能不需要外部電路,但在 3.3V 與 5V 之間傳送信號(hào)的系統(tǒng)則會(huì)受到電源變化的影響。例如,在 3.3V 系統(tǒng)中,ADC轉(zhuǎn)換1V峰值的模擬信號(hào),其分辨率要比5V系統(tǒng)中 ADC 轉(zhuǎn)換的高,這是因?yàn)樵?3.3V ADC 中,ADC 量程中更多的部分用于轉(zhuǎn)換。但另一方面,3.3V 系統(tǒng)中相對(duì)較高的信號(hào)幅值,與系統(tǒng)較低的共模電壓限制可能會(huì)發(fā)生沖突。
因此,為了補(bǔ)償上述差異,可能需要某種接口電路。本節(jié)將討論接口電路,以幫助緩和信號(hào)在不同電源之間轉(zhuǎn)換的問(wèn)題。
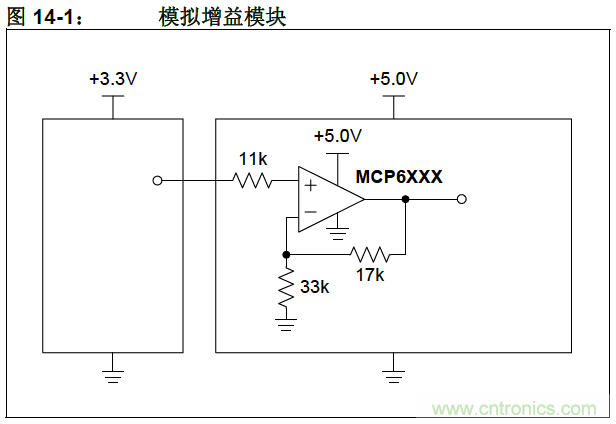
技巧十四:3.3V→5V模擬增益模塊
從 3.3V 電源連接至 5V 時(shí),需要提升模擬電壓。33 kΩ 和 17 kΩ 電阻設(shè)定了運(yùn)放的增益,從而在兩端均使用滿量程。11 kΩ 電阻限制了流回 3.3V 電路的電流。
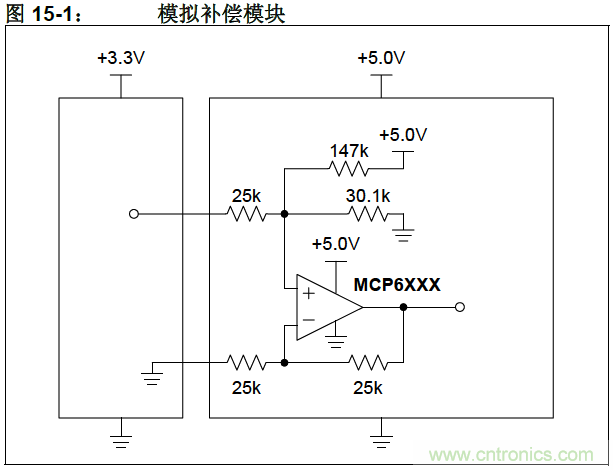
技巧十五:3.3V→5V模擬補(bǔ)償模塊
該模塊用于補(bǔ)償 3.3V 轉(zhuǎn)換到 5V 的模擬電壓。下面是將 3.3V 電源供電的模擬電壓轉(zhuǎn)換為由 5V電源供電。右上方的 147 kΩ、 30.1 kΩ 電阻以及+5V 電源,等效于串聯(lián)了 25 kΩ 電阻的 0.85V 電壓源。這個(gè)等效的 25 kΩ 電阻、三個(gè) 25 kΩ 電阻以及運(yùn)放構(gòu)成了增益為 1 V/V 的差動(dòng)放大器。0.85V等效電壓源將出現(xiàn)在輸入端的任何信號(hào)向上平移相同的幅度;以 3.3V/2 = 1.65V 為中心的信號(hào)將同時(shí)以 5.0V/2 = 2.50V 為中心。左上方的電阻限制了來(lái)自 5V 電路的電流。
技巧十六:5V→3.3V有源模擬衰減器
此技巧使用運(yùn)算放大器衰減從 5V 至 3.3V 系統(tǒng)的信號(hào)幅值。
要將 5V 模擬信號(hào)轉(zhuǎn)換為 3.3V 模擬信號(hào),最簡(jiǎn)單的方法是使用 R1:R2 比值為 1.7:3.3 的電阻分壓器。然而,這種方法存在一些問(wèn)題。
1)衰減器可能會(huì)接至容性負(fù)載,構(gòu)成不期望得到的低通濾波器。
2)衰減器電路可能需要從高阻抗源驅(qū)動(dòng)低阻抗負(fù)載。
無(wú)論是哪種情形,都需要運(yùn)算放大器用以緩沖信號(hào)。
所需的運(yùn)放電路是單位增益跟隨器 (見圖 16-1)。
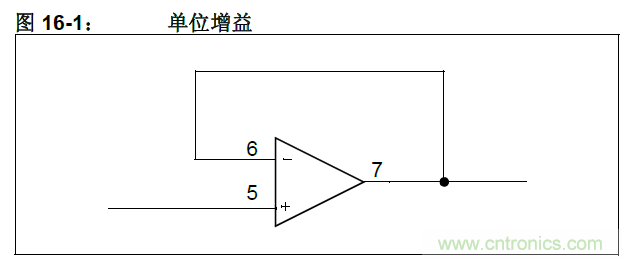
電路輸出電壓與加在輸入的電壓相同。
為了把 5V 信號(hào)轉(zhuǎn)換為較低的 3V 信號(hào),我們只要加上電阻衰減器即可。
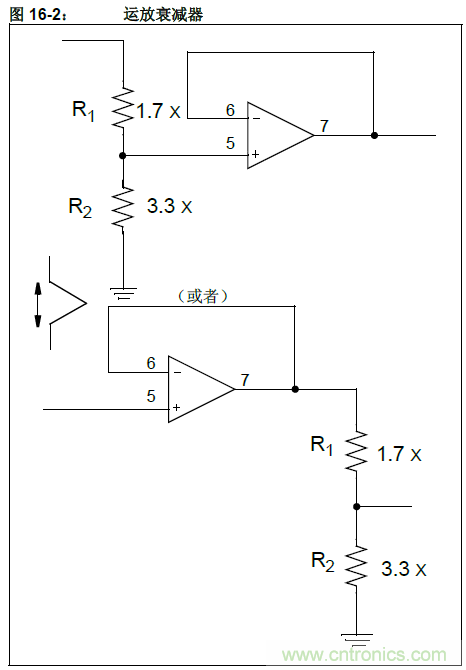
如果電阻分壓器位于單位增益跟隨器之前,那么將為 3.3V 電路提供最低的阻抗。此外,運(yùn)放可以從3.3V 供電,這將節(jié)省一些功耗。如果選擇的 X 非常大的話, 5V 側(cè)的功耗可以最大限度地減小。
如果衰減器位于單位增益跟隨器之后,那么對(duì) 5V源而言就有最高的阻抗。運(yùn)放必須從 5V 供電,3V 側(cè)的阻抗將取決于 R1||R2 的值。
技巧十七:5V→3.3V模擬限幅器
在將 5V 信號(hào)傳送給 3.3V 系統(tǒng)時(shí),有時(shí)可以將衰減用作增益。如果期望的信號(hào)小于 5V,那么把信號(hào)直接送入 3.3V ADC 將產(chǎn)生較大的轉(zhuǎn)換值。當(dāng)信號(hào)接近 5V 時(shí)就會(huì)出現(xiàn)危險(xiǎn)。所以,需要控制電壓越限的方法,同時(shí)不影響正常范圍中的電壓。這里將討論三種實(shí)現(xiàn)方法。
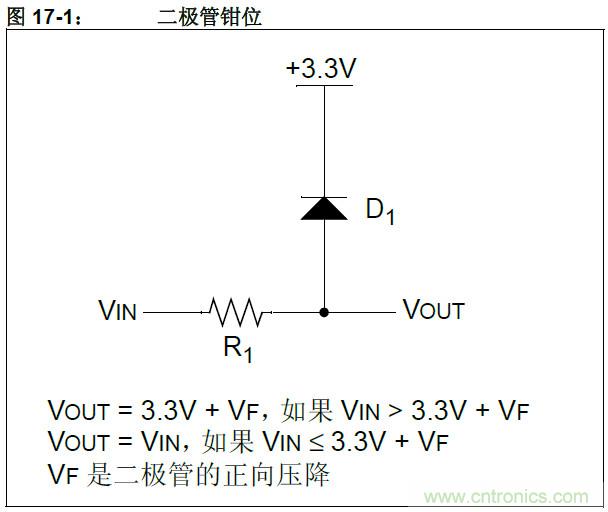
1. 使用二極管,鉗位過(guò)電壓至 3.3V 供電系統(tǒng)。
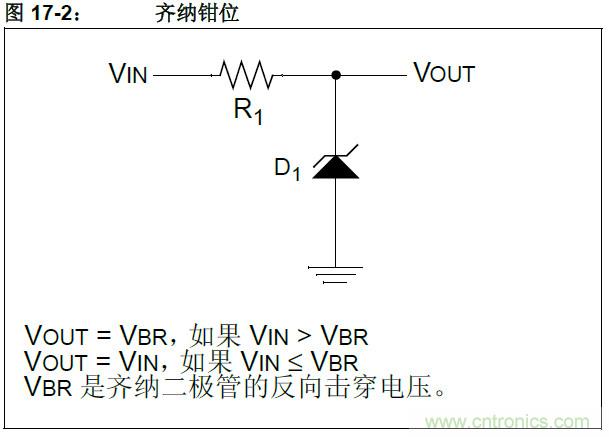
2. 使用齊納二極管,把電壓鉗位至任何期望的電壓限。
3. 使用帶二極管的運(yùn)算放大器,進(jìn)行精確鉗位。
進(jìn)行過(guò)電壓鉗位的最簡(jiǎn)單的方法,與將 5V 數(shù)字信號(hào)連接至 3.3V 數(shù)字信號(hào)的簡(jiǎn)單方法完全相同。使用電阻和二極管,使過(guò)量電流流入 3.3V 電源。選用的電阻值必須能夠保護(hù)二極管和 3.3V 電源,同時(shí)還不會(huì)對(duì)模擬性能造成負(fù)面影響。如果 3.3V 電源的阻抗太低,那么這種類型的鉗位可能致使3.3V 電源電壓上升。即使 3.3V 電源有很好的低阻抗,當(dāng)二極管導(dǎo)通時(shí),以及在頻率足夠高的情況下,當(dāng)二極管沒(méi)有導(dǎo)通時(shí) (由于有跨越二極管的寄生電容),此類鉗位都將使輸入信號(hào)向 3.3V 電源施加噪聲。
為了防止輸入信號(hào)對(duì)電源造成影響,或者為了使輸入應(yīng)對(duì)較大的瞬態(tài)電流時(shí)更為從容,對(duì)前述方法稍加變化,改用齊納二極管。齊納二極管的速度通常要比第一個(gè)電路中所使用的快速信號(hào)二極管慢。不過(guò),齊納鉗位一般來(lái)說(shuō)更為結(jié)實(shí),鉗位時(shí)不依賴于電源的特性參數(shù)。鉗位的大小取決于流經(jīng)二極管的電流。這由 R1 的值決定。如果 VIN 源的輸出阻抗足夠大的話,也可不需要 R1。
如果需要不依賴于電源的更為精確的過(guò)電壓鉗位,可以使用運(yùn)放來(lái)得到精密二極管。電路如圖 17-3所示。運(yùn)放補(bǔ)償了二極管的正向壓降,使得電壓正好被鉗位在運(yùn)放的同相輸入端電源電壓上。如果運(yùn)放是軌到軌的話,可以用 3.3V 供電。
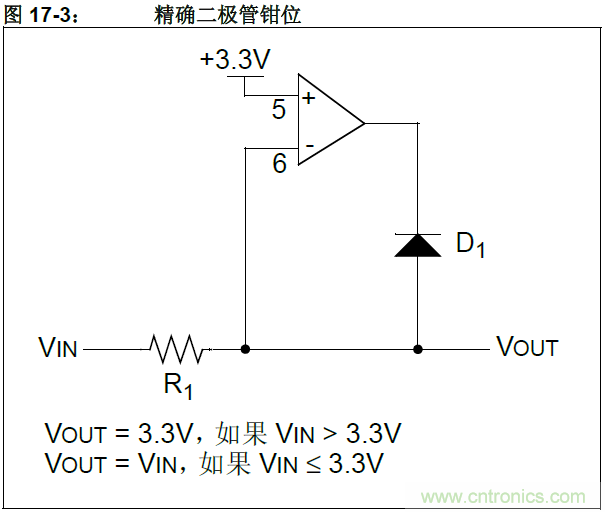
由于鉗位是通過(guò)運(yùn)放來(lái)進(jìn)行的,不會(huì)影響到電源。
運(yùn)放不能改善低電壓電路中出現(xiàn)的阻抗,阻抗仍為R1 加上源電路阻抗。
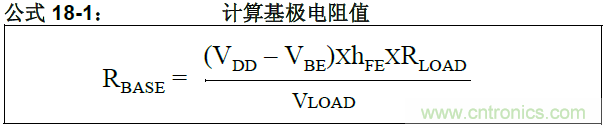
技巧十八:驅(qū)動(dòng)雙極型晶體管
在驅(qū)動(dòng)雙極型晶體管時(shí),基極 “驅(qū)動(dòng)”電流和正向電流增益 (Β/hFE)將決定晶體管將吸納多少電流。如果晶體管被單片機(jī) I/O 端口驅(qū)動(dòng),使用端口電壓和端口電流上限 (典型值 20 mA)來(lái)計(jì)算基極驅(qū)動(dòng)電流。如果使用的是 3.3V 技術(shù),應(yīng)改用阻值較小的基極電流限流電阻,以確保有足夠的基極驅(qū)動(dòng)電流使晶體管飽和。
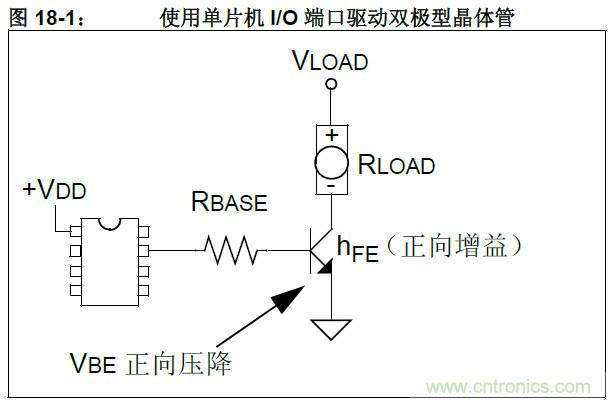
RBASE的值取決于單片機(jī)電源電壓。公式18-1 說(shuō)明了如何計(jì)算 RBASE。

如果將雙極型晶體管用作開關(guān),開啟或關(guān)閉由單片機(jī) I/O 端口引腳控制的負(fù)載,應(yīng)使用最小的 hFE規(guī)范和裕度,以確保器件完全飽和。
3V 技術(shù)示例:
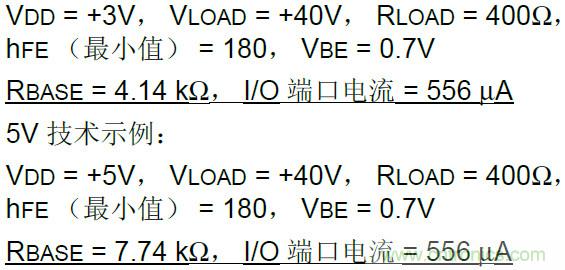
對(duì)于這兩個(gè)示例,提高基極電流留出裕度是不錯(cuò)的做法。將 1 mA 的基極電流驅(qū)動(dòng)至 2 mA 能確保飽和,但代價(jià)是提高了輸入功耗。
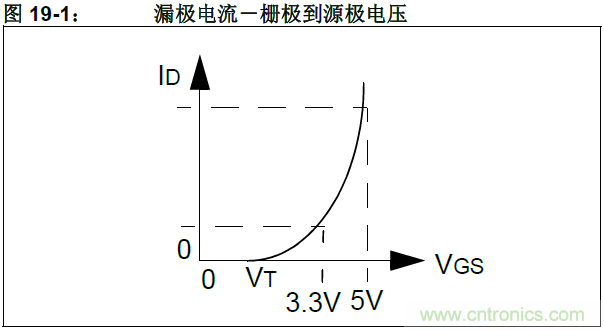
技巧十九:驅(qū)動(dòng)N溝道MOSFET晶體管
在選擇與 3.3V 單片機(jī)配合使用的外部 N 溝道MOSFET 時(shí),一定要小心。MOSFET 柵極閾值電壓表明了器件完全飽和的能力。對(duì)于 3.3V 應(yīng)用,所選 MOSFET 的額定導(dǎo)通電阻應(yīng)針對(duì) 3V 或更小的柵極驅(qū)動(dòng)電壓。例如,對(duì)于具有 3.3V 驅(qū)動(dòng)的100 mA負(fù)載,額定漏極電流為250 μA的FET在柵極 - 源極施加 1V 電壓時(shí),不一定能提供滿意的結(jié)果。在從 5V 轉(zhuǎn)換到 3V 技術(shù)時(shí),應(yīng)仔細(xì)檢查柵極- 源極閾值和導(dǎo)通電阻特性參數(shù),如圖 19-1 所示。稍微減少柵極驅(qū)動(dòng)電壓,可以顯著減小漏電流。
對(duì)于 MOSFET,低閾值器件較為常見,其漏-源電壓額定值低于 30V。漏-源額定電壓大于 30V的 MOSFET,通常具有更高的閾值電壓 (VT)。
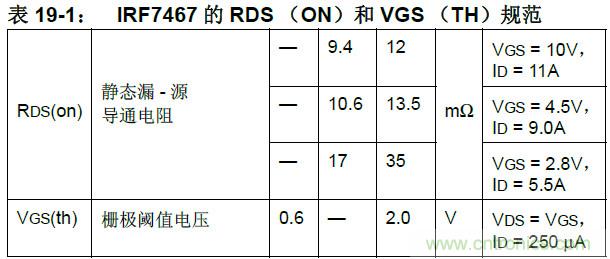
如表 19-1 所示,此 30V N 溝道 MOSFET 開關(guān)的閾值電壓是 0.6V。柵極施加 2.8V 的電壓時(shí),此MOSFET 的額定電阻是 35 mΩ,因此,它非常適用于 3.3V 應(yīng)用。
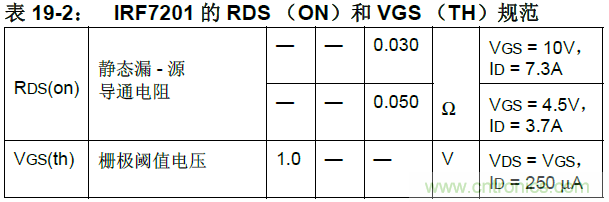
對(duì)于 IRF7201 數(shù)據(jù)手冊(cè)中的規(guī)范,柵極閾值電壓最小值規(guī)定為 1.0V。這并不意味著器件可以用來(lái)在1.0V 柵 - 源電壓時(shí)開關(guān)電流,因?yàn)閷?duì)于低于 4.5V 的VGS (th),沒(méi)有說(shuō)明規(guī)范。對(duì)于需要低開關(guān)電阻的 3.3V 驅(qū)動(dòng)的應(yīng)用,不建議使用 IRF7201,但它可以用于 5V 驅(qū)動(dòng)應(yīng)用。
推薦閱讀:




