
【導讀】隨著現(xiàn)代工業(yè)的發(fā)展,電網(wǎng)中使用的感性負載也愈來愈多,如感應式電動機、變壓器等。這些設備在工作時不但要消耗有功功率,同時需要電網(wǎng)向其提供相應的無功功率,造成電網(wǎng)的功率因數(shù)偏低。
隨著現(xiàn)代工業(yè)的發(fā)展,電網(wǎng)中使用的感性負載也愈來愈多,如感應式電動機、變壓器等。這些設備在工作時不但要消耗有功功率,同時需要電網(wǎng)向其提供相應的無功功率,造成電網(wǎng)的功率因數(shù)偏低。
在電網(wǎng)中并聯(lián)電容器可以減少電網(wǎng)向感性負載提供的無功功率,從而降低輸電線路因輸送無功功率造成的輸電損耗,改善電網(wǎng)的運行條件,因此功率因數(shù)補償控制器一直有著廣闊的應用市場。本文所介紹的功率因數(shù)補償控制器符合 JB/T9663-1999 國家標準,主要功能有:
(1) 相序自動識別
(2) 電壓、電流、功率因數(shù)采樣與顯示
(3) 過壓解除、欠流封鎖,從而保護電容器及避免循環(huán)投切
(4) 采用先投入的先切除,先切除的先投入的原則,對補償電容實行循環(huán)投切
(5) 所有的工作參數(shù)都可以通過面板按鍵設定,包括投入門限、切除門限、過壓保護門限、欠電流封鎖門限、投切延時時間
一、 工作原理
采樣三相電源中一線電流(如 A 線)與另外兩線的電壓(如 BC 線)之間的相位差,通過一定的運算,得到當前電網(wǎng)的實時功率因數(shù)。此功率因數(shù)與設定的投入門限和切除門限比較,在整個投切延時時間內(nèi),若在投切門限以內(nèi),則不予動作;若小于投入門限,則另投入一組電容器;若大于切除門限或發(fā)現(xiàn)功率因數(shù)為負時,則切除一組已投入的電容器。再經(jīng)過投切延時時間,重復比較與投切,直到當前的功率因數(shù)達到投切門限以內(nèi)。在投切過程中,若發(fā)現(xiàn)檢測到的電壓大于設定的過壓保護門限,則按組切除所有已投入的電容;當檢測到的電壓超過設定的過壓保護門限的 10%時,則一次性切除所有已投入的電容,用以保護電容器。在投切時若發(fā)現(xiàn)檢測到的電流小于欠電流封鎖門限,則停止投切動作,避免系統(tǒng)出現(xiàn)循環(huán)投切現(xiàn)象。
由于在三相供電中有不同接線方法,不同的接線方法對功率因數(shù)的算法也不一樣,因此我們規(guī)定 ARC 系列功率因數(shù)自動補償控制儀的電流取自三相供電中的 A 線,電壓取自 BC 間的線電壓,同時為減少現(xiàn)場接線的復雜度,我們在程序中對相位進行自動判別。
在三相供電中,我們假設三相的相電壓分別為 Ua、Ub、Uc,A 線電流為 Ia
則有 Ua=Usin(ωt),Ub=Usin(ωt+120o),Uc=Usin(ωt+240o),
從而得到 BC 間的線電壓為 Ubc=Ub-Uc= Usin(ωt-90o)
若 A 線負載為純阻性,則 A 線電流 Ia 與 A 線電壓 Ua 同相,Ia 超前 Ubc 的角度為 90o;
若 A 線負載為感性,則 A 線電流 Ia 滯后 A 線電壓 Ua 角度為φ(0o≤φ≤90o),Ia 超前 Ubc 的角度為 90o-φ;
若 A 線負載為容性,則 A 線電流 Ia 超前 A 線電壓 Ua 角度為φ(0o≤φ≤90o),Ia 超前 Ubc 的角度為 90o+φ
在我們的 ARC 功率因數(shù)自動補償控制儀中,為了計算的方便,我們電流相位的采樣為電壓采樣的第二個周期,即若沒有相位差 Ia 滯后 Ua 的角度為 360o。在實際檢測中,假設我們檢測到 Ia 滯后 Ubc 的角度為α,根據(jù)以上的分析得知:
若 180o《α《270o,則電路為容性負載,COSφ=COS(270o-α)
若α=270o,則電路為感性負載,COSφ=1
若 270o《α《360o,則電路為感性負載 COSφ=COS(α-270o)
為方便用戶接線,若用戶將電壓 Ubc 接成了 Ucb,或?qū)?Ia 的輸入接反,根據(jù)以上的推斷,我們同樣可得到:
若 0o《α《90o,則電路為容性負載,COSφ=COS(90o-α)
若α=90o,則電路為感性負載,COSφ=1
若 90o《α《180o,則電路為感性負載 COSφ=COS(α-90o)
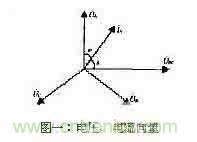
圖 1 電壓、電流向量
二、 硬件的設計
控制器的 CPU 采用 ATMEL 的 ATMEGA16-8L,此單片機工作電壓范圍寬(2.7 - 5.5V),最高工作頻率為 8MHz;芯片內(nèi)部具有 16k 字節(jié)的 Flash 程序程序存儲器,512 字節(jié)的 EEPROM,1K 字節(jié)的片內(nèi) SRAM;8 路 10 位 ADC;一個可編程的串行 USART,具有獨立片內(nèi)振蕩器的可編程看門狗定時器;兩個具有獨立預分頻器和比較器功能的 8 位定時器 / 計數(shù)器 ;一個具有預分頻器、比較功能和捕捉功能的 16 位定時器 / 計數(shù)器。顯示芯片采用南京沁恒公司生產(chǎn)的鍵盤、顯示專用芯片 CH451S,CH451S 最大能驅(qū)動 8 為數(shù)碼管,且不需外加驅(qū)動就能直接驅(qū)動 LED 數(shù)碼管,大大減小了印板尺寸,單片機的采用 SPI 模式,只需 3 線(片選 CS、時鐘 CLK、數(shù)據(jù)輸入 DIN),因本系統(tǒng)未用 CH451S 的鍵盤功能,所以 CH451S 的 DOUT 引腳不用。Ubc 的電壓信號經(jīng)過電阻限流進入 2mA/2mA 的隔離變換器后分為兩路,一路進入模擬絕對值處理電路送入單片機的 A/D 轉換口 ADC0,作為電壓顯示信號,另一路經(jīng)過零比較后進入單片機中斷口 INT0;同樣 Ia 的電流信號經(jīng) 5A/5mA 的隔離變換器后分為兩路,一路進入模擬絕對值處理電路送入單片機的 A/D 轉換口 ADC1,作為電流顯示信號,另一路經(jīng)過零比較后進入單片機定時器門控端 ICP 引腳。
補償控制器如何設計?")
圖 2 ATMEGA16 外部引腳
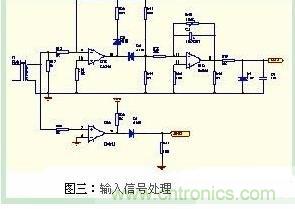
圖 3 輸入信號處理
三、 軟件的設計
因整個系統(tǒng)對電壓、電流采樣的精度要求不高,我們直接用 CPU 的 10 位 A/D 對電壓、電流的信號進行 A/D 轉換,轉換的結果一方面供顯示的需要,另一方面作為過壓與欠流的比較信號。我們將 INT0 設置為上升沿產(chǎn)生異步中斷,ICP 設置為上升沿觸發(fā)輸入捕捉。當 INT0 產(chǎn)生中斷時,16 位計數(shù)器開始以內(nèi)部恒定的頻率開始計數(shù),直到下一中斷的產(chǎn)生。在計數(shù)的同時,當 TCP 上有上升沿脈沖時,即將 16 位計數(shù)器已計得的數(shù)據(jù)放入到捕捉寄存器中。當一個采樣周期結束時,計數(shù)器中得數(shù)據(jù)(N)即為外部交流信號的一個周期基數(shù), 捕捉寄存器中數(shù)據(jù)(n)電流 Ia 滯后電壓 Ubc 的基數(shù),將(n/N)*360o 即為角度,根據(jù)上面的原理就可判斷在同一周波中時電壓超前電流還是電流超前電壓,同時還可得出超前或滯后的角度,將此數(shù)據(jù)進行查表即可得到功率因數(shù)。
為了避免對電容器組中的某一組進行頻繁的投切,平衡每一組電容器的工作時間,延長整個系統(tǒng)的使用壽命。我們對電容器的投切采用先投入的優(yōu)先切除,先切除的優(yōu)先投入的原則,我們在單片機的 RAM 中開辟了一空間,用于記錄每組電容器的投入與切除時間,然后進行排序,將已工作時間最長的作為優(yōu)先切除對象,將切除時間最長的作為優(yōu)先投入對象。
當三相交流的負載回路電流非常小時,會產(chǎn)生投切振蕩的現(xiàn)象。也就是說控制系統(tǒng)投入一組電容器會產(chǎn)生過投,切除一組電容器又會產(chǎn)生投入不足,控制器就會產(chǎn)生重復的投切現(xiàn)象。為避免此想象的發(fā)生,我們設置了欠電流鎖定,當電流值小于此數(shù)值時,系統(tǒng)將停止對電容器的投切動作,維持已投入的電容器工作。
在工作過程中,若采樣到的電壓數(shù)據(jù)大于設定的過壓保護值時,控制器將逐步切除已投入的電容器,若發(fā)現(xiàn)超過設定的保護值的 10%時,則一次性切除所有已投入的電容器,保護電容器。
免責聲明:本文為轉載文章,轉載此文目的在于傳遞更多信息,版權歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權問題,請聯(lián)系小編進行處理。



