

【導(dǎo)讀】忙碌一周后,家庭清潔工作是人們最不愿做的事情之一。迄今為止,掃地機器人已面世約23年了,隨著其智能和自動化程度日益提高,人們可以在其工作時專注于自己的事情。
如今的掃地機器人上集成了非常多的功能,比如新的拖地功能和自動除塵等。但對設(shè)計人員來說,這也意味著在設(shè)計可靠的系統(tǒng)時將會面臨更多的挑戰(zhàn)。而小型放大器可以幫助其快速克服許多重大挑戰(zhàn)。下文列舉了設(shè)計人員在設(shè)計過程中會遇到的六種挑戰(zhàn),以及小型放大器能提供的六種解決方案:
設(shè)計挑戰(zhàn)1:由于失速檢測延遲,導(dǎo)致電機壽命縮短。
掃地機器人車輪的力量決定了它的越障能力。為了能夠通過厚地毯和越過門檻,其電機功率需要達到至少30W或更高。如果發(fā)生失速或過載事件,例如車輪被電線卡住,電機繞組電流將立即上升。延遲檢測到這種情況會導(dǎo)致電機過熱并縮短其壽命。
解決方案1:電機控制系統(tǒng)中的快速瞬態(tài)響應(yīng)電流感應(yīng)。
為減少過熱的可能性,可以使用低側(cè)電流感應(yīng)電路來監(jiān)控電機的電流;見圖1。
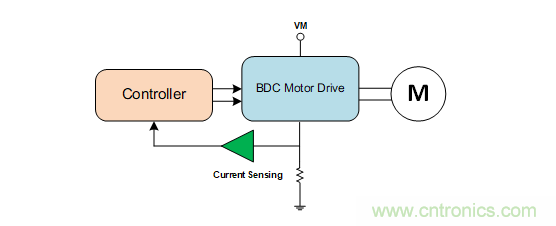
圖1:電機控制系統(tǒng)中的電流感應(yīng)電路
在該應(yīng)用中用作運算放大器(op amps)電機控制系統(tǒng)中的電流感測電路的關(guān)鍵參數(shù)是壓擺率。例如,當發(fā)生失速事件時,繞組電流會從0.5 A上升到3.5 A,運算放大器的相應(yīng)輸出為0.5 V至3.5 V(50mΩ分流電阻和20-V/V增益)。使用壓擺率為0.5 V/μs的運算放大器時,階躍變化的安定時間約為6μs,而使用TI的TLV905x等壓擺率為15 V/μs的運算放大器,相同階躍變化的安定時間僅為0.2μs。因此,使用瞬態(tài)響應(yīng)速度提高30倍的 TLV905x 將增加控制器執(zhí)行過流保護的余量。
設(shè)計挑戰(zhàn)2:由于充電電壓不準確,導(dǎo)致電池續(xù)航時間縮短。
擴大電池容量是掃地機器人面臨的一大重要設(shè)計挑戰(zhàn)。消費者期望機器人在需要再次充電前,能夠完成一個完整的清潔周期。
使用低質(zhì)量電流感測的高輸出電壓紋波將產(chǎn)生無法使用的電池容量。例如,如果4.2 V時的電池精度為±3.5%,經(jīng)過250次充電循環(huán)后會將可用電池容量降低至40%,而如果4.2 V時的電池精度為±0.5,則會使可用電池容量保持在85%。
解決方案2:恒流/恒壓回路中的高精度電壓/電流感應(yīng)。
對電池充電的一種常見方法是使用如圖2所示的分立充電解決方案。電壓和電流感應(yīng)電路在控制回路中產(chǎn)生反饋電壓和電流信號。為了實現(xiàn)高精度和穩(wěn)定性,偏移電壓和溫度漂移是此處所用運算放大器的兩大關(guān)鍵參數(shù)。
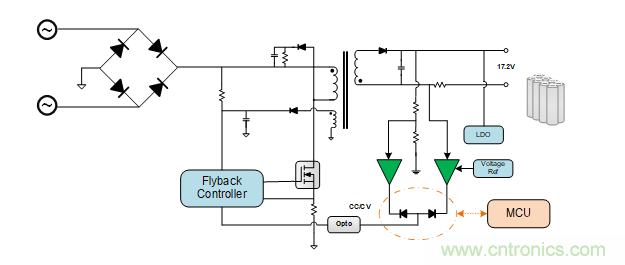
圖2:分立電池充電器電路
設(shè)計挑戰(zhàn)3:由于負溫度系數(shù)(NTC)熱敏電阻錯誤,導(dǎo)致電池過熱。
監(jiān)控電池組的溫度是掃地機器人的一大主要安全問題。與溫度傳感器的解決方案相比,監(jiān)控電池組溫度的具有成本效益的方法是使用NTC熱敏電阻感測電路。溫度感測不準可能導(dǎo)致電池組過熱或燒壞。
解決方案3:使用NTC進行高精度溫度測量。
測量溫度的一種方法是使用電阻和熱敏電阻來分配電源,并將分壓器輸出直接連接到系統(tǒng)控制器內(nèi)部的模數(shù)轉(zhuǎn)換器(ADC)引腳。分壓器的輸出阻抗很低,輸出電壓范圍對ADC來說并不理想,因此這種方式效率不高,且測量結(jié)果不準確。
圖3使用運算放大器作為調(diào)節(jié)溫度輸出信號的緩沖器,為分壓器和低阻抗節(jié)點提供高阻抗節(jié)點以驅(qū)動ADC,并將輸出范圍調(diào)節(jié)至最佳ADC分辨率。運算放大器的影響參數(shù)包括直流精度(偏移電壓、電壓漂移)和穩(wěn)定性。
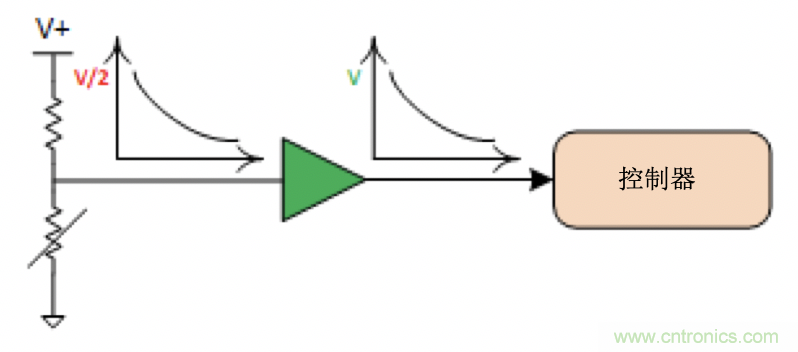
圖3:NIC熱敏電阻感測電路
設(shè)計挑戰(zhàn)4:由于里程計測量不準,導(dǎo)致定位和導(dǎo)航系統(tǒng)精度較低。
當掃地機器人構(gòu)建環(huán)境地圖時,里程計應(yīng)提供用于繪圖的準確行進距離。里程計測量不準將導(dǎo)致機器人的定位和導(dǎo)航精度較低。
解決方案4:可用穩(wěn)健的里程計信號增強電路。
測量里程的常用方法是使用光電解碼器或霍爾效應(yīng)傳感器并對脈沖進行計數(shù),以獲得里程信息。通常來講,里程計安裝在車輪內(nèi)部,因此印刷電路板走線很長,更容易受到開關(guān)噪聲的影響,從而導(dǎo)致輸出信號在MCU的輸入端口失真。如圖4所示的緩沖電路可產(chǎn)生無抖動和失靈的標準邏輯信號。
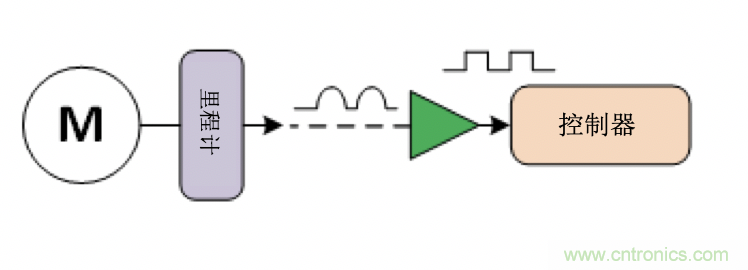
圖4:用于穩(wěn)健邏輯輸出電路的緩沖器
設(shè)計挑戰(zhàn)5:嘈雜/失真的電機驅(qū)動信號會導(dǎo)致電機意外運行。
系統(tǒng)控制器通常位于控制板的中心,而電機安裝在電路板的邊緣。因此,直接連接到MCU端口的驅(qū)動信號更容易產(chǎn)生噪聲或失真,導(dǎo)致電機意外運行。
解決方案5:電機驅(qū)動路徑中的脈寬調(diào)制(PWM)增強器電路。
此處的解決方案是加裝一個用作增強器的運算放大器,而不是將驅(qū)動信號與MCU引腳連接的電路。圖5所示為用于有刷直流電機的分立電機驅(qū)動解決方案??刂破魍ㄟ^圖騰柱場效應(yīng)晶體管驅(qū)動器產(chǎn)生PWM信號,以驅(qū)動H橋功率晶體管。PWM增強器電路有助于最大限度地減少延遲并增強PWM信號,同時降低噪聲和失真。
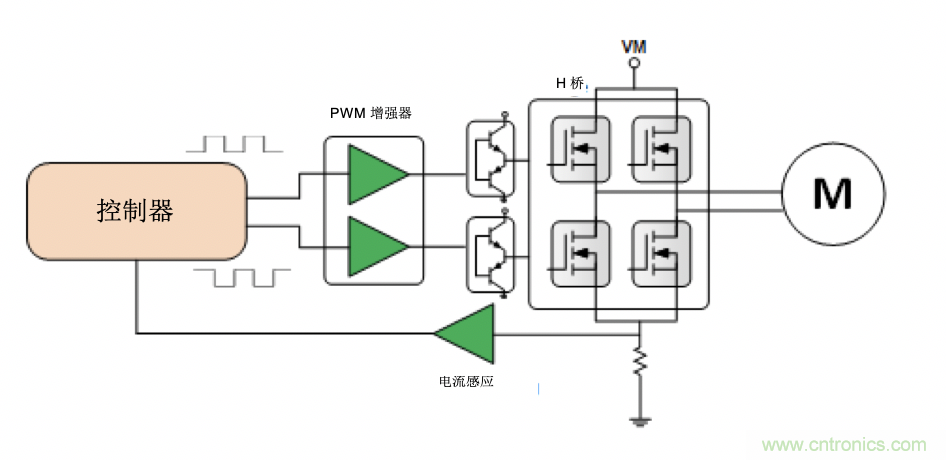
圖5:增強型PWM電路
設(shè)計挑戰(zhàn)6:由于掃地機器人距離檢測出錯,導(dǎo)致碰撞或跌落事故。
防跌落傳感器用于檢測樓梯的高度,而碰撞傳感器用于檢測掃地機器人周圍的障礙物。距離檢測出錯時,會導(dǎo)致傳感器性能不準,從而發(fā)生碰撞或跌落事件,并導(dǎo)致機器人損壞。
解決方案6:高精度紅外輸出信號調(diào)節(jié)。
如圖6所示,紅外LED和光電晶體管被廣泛用作檢測距離的低成本解決方案。距離信息與固定頻率調(diào)制波所攜帶回波的幅度相關(guān)。
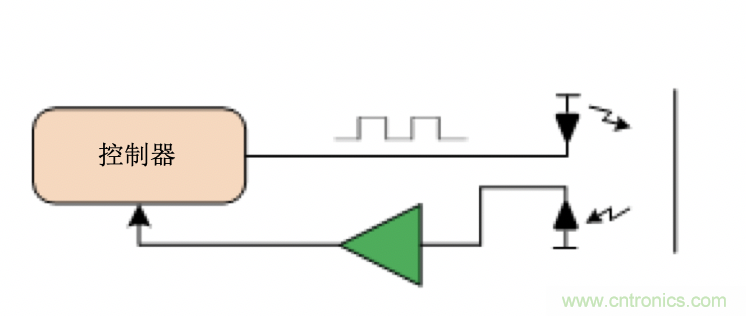
圖6:紅外LED接收器的信號調(diào)節(jié)電路
具有低輸入偏置電流的互阻抗運算放大器電路在此處被廣泛使用。參考電路如SBOA268A所示。
TI的TLV906x、TLV905x和TLV900x通用放大器非常適用于上述的六種情況,設(shè)計人員可以利用其縮短產(chǎn)品上市時間,并克服常見的設(shè)計挑戰(zhàn)。
推薦閱讀:



