
【導(dǎo)讀】ITU-T G.701標(biāo)準(zhǔn)對(duì)抖動(dòng)的定義為:“抖動(dòng)是指數(shù)字信號(hào)在短期內(nèi)重要的瞬時(shí)變化相對(duì)于理想位置發(fā)生的偏移”。還有一個(gè)跟抖動(dòng)很類似的概念,即漂移。一般情況下,抖動(dòng)是指發(fā)生得比較快的定時(shí)偏差,而漂移是指發(fā)生的比較慢得定時(shí)偏差。ITU把漂移和抖動(dòng)之間的門限定義為10Hz,偏移頻率大于10Hz的叫抖動(dòng),小于10Hz的叫做漂移。
抖動(dòng)可以分為隨機(jī)性抖動(dòng)(RJ)和確定性抖動(dòng)(DJ),而確定性抖動(dòng)又可以分為周期性抖動(dòng)(PJ)、數(shù)據(jù)相關(guān)抖動(dòng)(DDJ)和占空比抖動(dòng)(DCD)三種,如下圖所示:
縮略語:
● TJ:Total Jitter 總抖動(dòng)
● DJ:Deterministic Jitter 確定性抖動(dòng)
● RJ:Random Jitter 隨機(jī)抖動(dòng)
● PJ:Periodic Jitter 周期性抖動(dòng)
● DDJ:Data Dependent Jitter 數(shù)據(jù)相關(guān)抖動(dòng)
● DCD:Duty Cycle Distortion 工作周期抖動(dòng)
● TIE:Time Interval Error 時(shí)間區(qū)間誤差
● RMS:Root Mean Square 均方根
● ISI:Inter Symbol Interference 碼間干擾
1.隨機(jī)抖動(dòng)(RJ)
隨機(jī)抖動(dòng)產(chǎn)生的原因很復(fù)雜,很難消除。器件的內(nèi)部熱噪聲,晶體的隨機(jī)振動(dòng),宇宙射線等都可能引起隨機(jī)抖動(dòng)。
隨機(jī)抖動(dòng)滿足高斯分布,在理論上是無邊界的,只要測(cè)試的時(shí)間足夠長(zhǎng),隨機(jī)抖動(dòng)也是無限大的。高斯分布概率密度函數(shù)圖形如下圖所示。
所以隨機(jī)抖動(dòng)的鋒-鋒值必須伴同誤碼率BER表示出來,RJRMS=概率密度函數(shù)(pdf)的標(biāo)準(zhǔn)偏差:σ,隨機(jī)抖動(dòng)的鋒-鋒值RJpk-pk=N*σ,按不同的BER,N不同,如下圖所示:
2.確定性抖動(dòng)(DJ)
確定性抖動(dòng)不是高斯分布,通常是有邊際的,它是可重復(fù)可預(yù)測(cè)的。信號(hào)的反射、串?dāng)_、開關(guān)噪聲、電源干擾、EMI等都會(huì)產(chǎn)生DJ。DJ的概率密度函數(shù)圖形如下圖所示:
1).周期性抖動(dòng)(PJ)
以周期方式重復(fù)的抖動(dòng)稱為周期性抖動(dòng),由于可以將周期波形分解為與諧波相關(guān)的正弦曲線的傅立葉級(jí)數(shù),因此,這類抖動(dòng)有時(shí)也稱為正弦抖動(dòng)。周期抖動(dòng)與數(shù)據(jù)流中任何定期重復(fù)的碼型無關(guān),周期抖動(dòng)一般是由耦合到系統(tǒng)中的外部確定的噪聲源引起的。可能的抖動(dòng)源有:電源的EMI干擾與擴(kuò)頻時(shí)鐘SSC的調(diào)制信號(hào)。
2).數(shù)據(jù)相關(guān)抖動(dòng)(DDJ)
DDJ一般是由于電纜或設(shè)備的帶寬限制及阻抗不匹配造成的。DDJ分為DCD和ISI兩種。
DCD值是相對(duì)于額定值50%的占空比偏差,一般分兩種情況:
①信號(hào)的上升沿和下降沿的斜率不同;
②信號(hào)DC平均值發(fā)生變化而導(dǎo)致波形的判決門限高/低于應(yīng)有值;
ISI又稱為DDJ數(shù)據(jù)相關(guān)抖動(dòng)或PDJ碼型相關(guān)抖動(dòng)。
因?yàn)樽杩共黄ヅ鋵?dǎo)致信號(hào)發(fā)射。被發(fā)射的信號(hào)疊加在原信號(hào)上導(dǎo)致信號(hào)幅度增加而最終使轉(zhuǎn)換電平所耗費(fèi)的時(shí)間更多,從而產(chǎn)生抖動(dòng)。對(duì)經(jīng)常切換的“1,0,1,0…”高頻信號(hào),其衰減比連續(xù)的“1,1,1,1,0,0,0,0…”低頻信號(hào)大。所以長(zhǎng)的連續(xù)不變碼會(huì)到達(dá)更高的電平,在跳變時(shí)需要更多的時(shí)間才能到達(dá)門限電平,導(dǎo)致信號(hào)抖動(dòng)。因?yàn)檫@個(gè)抖動(dòng)的幅度與碼型相關(guān),所以又稱碼型相關(guān)抖動(dòng)。
總抖動(dòng)鋒-鋒值:TJpk-pk=(N*RJRMS)+DJpk-pk
信號(hào)抖動(dòng)值的測(cè)量主要分為時(shí)鐘、并行總線和高速串行數(shù)據(jù)三大類。時(shí)鐘抖動(dòng)的測(cè)量指標(biāo)有:Period Jitter (周期抖動(dòng)),Cycle to Cycle Jitter (周期間抖動(dòng)),N-Cycle Jitter (N個(gè)周期后抖動(dòng)),TIE (時(shí)間間隔誤差)四種;并行總線以及其它所有的源同步數(shù)據(jù)總線中的數(shù)據(jù)與時(shí)鐘相關(guān)抖動(dòng)的測(cè)量指標(biāo)有:Setup/Hold time jitter(建立/保持時(shí)間抖動(dòng)),Clk-out time jitter,Crossover Voltage Jitter(差分交點(diǎn)電壓抖動(dòng))三種;高速串行數(shù)據(jù)的抖動(dòng)測(cè)量主要PLL TIE。
1).Period Jitter
周期性抖動(dòng)測(cè)量主要是針對(duì)時(shí)鐘信號(hào),它測(cè)量實(shí)時(shí)時(shí)鐘的每一個(gè)周期,然后對(duì)實(shí)際時(shí)鐘周期進(jìn)行數(shù)據(jù)統(tǒng)計(jì),最后根據(jù)概率統(tǒng)計(jì),給出該時(shí)鐘周期大小的分布規(guī)律,此測(cè)量將顯示信號(hào)的整體質(zhì)量。測(cè)量Period Jitter必須指定一定的采樣周期數(shù),不同的周期數(shù),抖動(dòng)的PK-PK值是不同的,JEDEC要求的采樣數(shù)最少為10000個(gè)。測(cè)量統(tǒng)計(jì)過程如下圖所示:
2).Cycle to Cycle Jitter
Cycle to Cycle Jitter 是測(cè)量任意兩個(gè)相鄰周期間信號(hào)的周期變化量,通周期性抖動(dòng)一樣,測(cè)量周期間抖動(dòng)也必須指定一定的周期數(shù)才能確定抖動(dòng)的鋒-鋒值,JEDEC中要求最少采樣1000個(gè)周期。測(cè)量統(tǒng)計(jì)過程如下圖所示:
3). N-Cycle Jitter
N個(gè)周期后抖動(dòng)是測(cè)量由參考點(diǎn)滯后相當(dāng)數(shù)量(N)個(gè)時(shí)鐘周期后沿的抖動(dòng),該參數(shù)描述的是抖動(dòng)的積累效應(yīng)。測(cè)量該指標(biāo)時(shí)需要一個(gè)邊沿的統(tǒng)計(jì)常數(shù)為參考,否則測(cè)出來的抖動(dòng)可能會(huì)大于一個(gè)UI。測(cè)量統(tǒng)計(jì)過程如下圖所示:
4).TIE
TIE是通過使用參考時(shí)鐘或時(shí)鐘恢復(fù)提供理想邊沿,據(jù)此來測(cè)量時(shí)鐘或者數(shù)據(jù)的每個(gè)有效邊沿與理想位置的差距。TIE在通信系統(tǒng)中尤為重要,因?yàn)樗@示了一段時(shí)間內(nèi)抖動(dòng)的趨勢(shì)。下圖Period Jitter、Cycle to Cycle Jitter及TIE之間的關(guān)系:
三種抖動(dòng)統(tǒng)計(jì)類型的趨勢(shì)圖如下所示:
5).Setup/Hold Time Jitter
Setup/Hold Time Jitter主要測(cè)量信號(hào)相對(duì)了時(shí)鐘采樣邊沿的建立/保持時(shí)間波動(dòng)情況,如下圖所示:
6).Crossover Voltage Jitter
Crossover Voltage Jitter主要測(cè)量差分信號(hào)P端的上升沿與N端的交叉點(diǎn)波動(dòng)情況,如下圖所示:
7).Clk-out Time Jitter
這個(gè)抖動(dòng)指標(biāo)跟Setup/Hold Time Jitter類似,只不過Setup/Hold Time Jitter是相對(duì)于接收端而言的,而Clk-out Time Jitter是相對(duì)與發(fā)送端而言的。
8).PLL TIE
該參數(shù)用于高速串行數(shù)據(jù)的抖動(dòng)測(cè)試中,PLL TIE使用了Gloden PLL來進(jìn)行時(shí)鐘恢復(fù),將串行數(shù)據(jù)速率除以1667作為PLL的環(huán)路帶寬。
在實(shí)際測(cè)量中,我們經(jīng)常會(huì)遇到RMS Jitter指標(biāo),實(shí)際上,RMS就是Root Mean Square(均方根),它等于概率分布密度函數(shù)的(pdf)的標(biāo)準(zhǔn)方差σ。
對(duì)于同時(shí)抖動(dòng)的RMS值一般為pk-pk值的1/7。
抖動(dòng)的分類
一、峰峰值抖動(dòng)、均方根抖動(dòng)
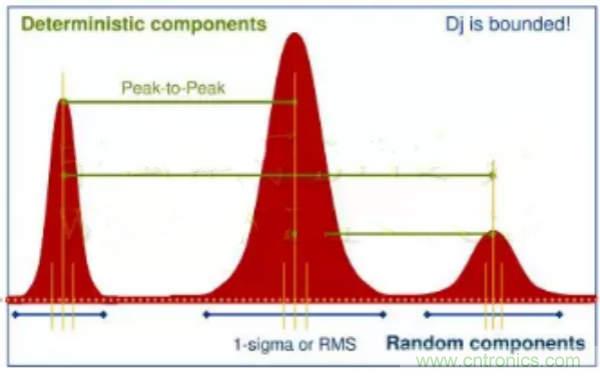
過去多年來用于量化抖動(dòng)的最常用的方法是峰峰值抖動(dòng)(Peak-to-peak Jitter)和均方根抖動(dòng)(Root-Mean-Square Jitter,抖動(dòng)直方圖或者抖動(dòng)分布的1 或者RMS值)。但是由于隨機(jī)抖動(dòng)以及非固定抖動(dòng)的存在,使得抖動(dòng)的峰峰值隨著觀察樣本數(shù)量的增加而增加,因此說峰峰值抖動(dòng)參數(shù)用于衡量固有抖動(dòng)會(huì)很有效,但是衡量隨機(jī)性抖動(dòng)卻會(huì)出現(xiàn)很大誤差;相同的道理,由于固有抖動(dòng)及非高斯性抖動(dòng)和噪聲的存在,使得抖動(dòng)的直方圖或者分布圖不呈現(xiàn)完全的高斯分布,因此統(tǒng)計(jì)得到的抖動(dòng)的1σ或者RMS值不等于真實(shí)高斯分布的1 值。
峰峰值抖動(dòng)和均方根抖動(dòng)均是對(duì)某一類抖動(dòng)的統(tǒng)計(jì)分析指標(biāo)。
二、相位抖動(dòng)、周期抖動(dòng)、相鄰周期間抖動(dòng)
由于時(shí)鐘系統(tǒng)是數(shù)字電路系統(tǒng)非常關(guān)鍵的一部分,直接決定了數(shù)據(jù)信號(hào)發(fā)送和接收的成敗,是整個(gè)系統(tǒng)的主動(dòng)脈,因此時(shí)鐘的抖動(dòng)一直備受關(guān)注。描述時(shí)鐘系統(tǒng)的抖動(dòng)參量一般分為三類,即相位抖動(dòng)(Phase jitter)、周期抖動(dòng)(Period jitter)、相鄰周期間抖動(dòng)(Cycle to cycle jitter).
1、相位抖動(dòng)
在數(shù)字系統(tǒng)中,兩個(gè)邏輯電平之間的切換通常伴隨著快沿的出現(xiàn),這些邊沿在時(shí)序上的不穩(wěn)定性就叫做相位抖動(dòng)(phase jitter,有時(shí)也叫累積抖動(dòng),accumulated jitter,指實(shí)際邊沿位置與理想邊沿位置的偏差,以時(shí)間為單位,也可以換算成弧度,角度等);相位抖動(dòng)是相位噪聲在數(shù)字域的等效體現(xiàn),它是離散量,因此只有當(dāng)邊沿存在時(shí)候才有定義。
理想邊沿位置一般定義在數(shù)字信號(hào)一個(gè)比特位時(shí)間間隔的整數(shù)倍位置處。如下圖1所示為某一
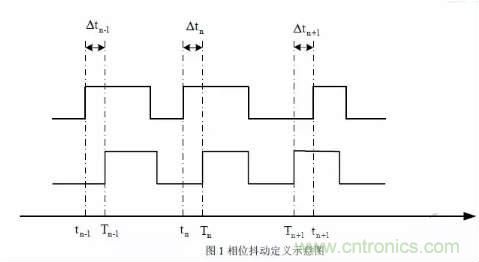
不會(huì)直接使用時(shí)鐘的邊沿來保證時(shí)序關(guān)系,而是看周期的穩(wěn)定性,也就是周期的抖動(dòng),有時(shí)候時(shí)鐘周期越長(zhǎng),可能帶來保持時(shí)間余量不足的問題,這個(gè)時(shí)候就需要測(cè)量周期抖動(dòng);而相鄰周期間抖動(dòng)常??梢杂脕砗饬繒r(shí)鐘分頻器的穩(wěn)定性??傊@三種抖動(dòng)都是衡量時(shí)鐘本身性能的指標(biāo),在不同的應(yīng)用背景下需要關(guān)注不同的指標(biāo),通常時(shí)鐘芯片的手冊(cè)會(huì)給出對(duì)時(shí)鐘的抖動(dòng)指標(biāo)要求。
三、串行數(shù)據(jù)系統(tǒng)中抖動(dòng)的分類
在上一篇文章中,我們提到了串行數(shù)據(jù)系統(tǒng)中接收端芯片的工作原理以及TIE(Time Interval Error)抖動(dòng)的概念,即數(shù)據(jù)與時(shí)鐘之間的相對(duì)抖動(dòng),而不是單純指數(shù)據(jù)本身或者時(shí)鐘本身的抖動(dòng)。那么如果我們假定時(shí)鐘邊沿位置(對(duì)于高速數(shù)據(jù)鏈路系統(tǒng),或者叫異步系統(tǒng)來說,該時(shí)鐘一般是恢復(fù)時(shí)鐘)為數(shù)據(jù)的理想邊沿,那么數(shù)據(jù)的TIE抖動(dòng)事實(shí)上就是前文中分析時(shí)鐘抖動(dòng)時(shí)的相位抖動(dòng),唯一不同的是時(shí)鐘信號(hào)的相位抖動(dòng)在每一個(gè)時(shí)鐘周期都會(huì)有一個(gè)數(shù)值;而數(shù)據(jù)信號(hào)常常有很多個(gè)連零電平或者連1電平,無邊沿存在,因此也就沒有對(duì)應(yīng)的相位抖動(dòng)數(shù)值。所以為了分清這兩類抖動(dòng)的概念,我們姑且在本文中暫定義時(shí)鐘信號(hào)的相位抖動(dòng)叫相位抖動(dòng);數(shù)據(jù)信號(hào)的相位抖動(dòng)就叫做TIE抖動(dòng)(時(shí)間間隔誤差);
TIE抖動(dòng)是分析串行數(shù)據(jù)抖動(dòng)的最基本單位,數(shù)據(jù)信號(hào)的每一個(gè)邊沿位置都會(huì)有一個(gè)TIE抖動(dòng)值。一段很長(zhǎng)的串行數(shù)據(jù)一定會(huì)包含數(shù)個(gè)上升沿或者下降沿,如下圖所示:
如果將所有邊沿處的TIE抖動(dòng)做一個(gè)直方圖統(tǒng)計(jì),我們可能會(huì)發(fā)現(xiàn)這些TIE值是具有一定的統(tǒng)計(jì)規(guī)律的,如下圖所示分別為呈現(xiàn)高斯分布的TIE抖動(dòng)以及呈現(xiàn)雙峰分布的TIE抖動(dòng):
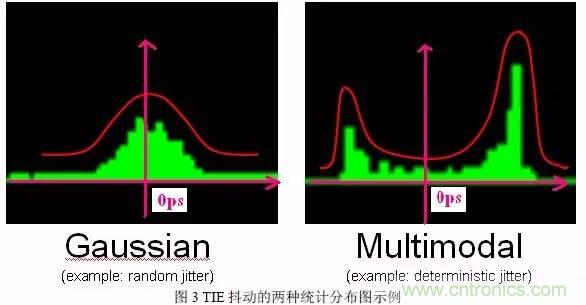
呈現(xiàn)高斯分布的抖動(dòng)通常是由于熱噪聲等引起的,稱為隨機(jī)抖動(dòng)(Random Jitter);呈現(xiàn)雙峰且將高斯曲線分成兩部分的雙峰之間的抖動(dòng)值稱為固有抖動(dòng)(Deterministic Jitter);通常來說抖動(dòng)成分主要是由隨機(jī)抖動(dòng)Rj和固有抖動(dòng)Dj構(gòu)成的,在之前的第二節(jié)我們有介紹到由于Rj的峰峰值是****的,隨著累積樣本數(shù)的增加而增加,因此通常是用統(tǒng)計(jì)標(biāo)準(zhǔn)偏差值(幾個(gè)sigma范圍內(nèi)的抖動(dòng)值)來衡量的;而Dj則是用峰峰值來衡量的。當(dāng)前大部分串行數(shù)據(jù)標(biāo)準(zhǔn)要求測(cè)量誤碼率為10e-12時(shí)的總體抖動(dòng)(Tj)大小,而通常直方圖+/-7 sigma以內(nèi)的數(shù)據(jù)樣本數(shù)才能達(dá)到10e+12。Tj就是衡量Dj與Rj的整體影響的抖動(dòng)術(shù)語。誤碼率為10e-12時(shí)的總體抖動(dòng)Tj=14Rj+Dj (Rj是指1sigma時(shí)的抖動(dòng)或者叫RMS抖動(dòng);Dj是固有抖動(dòng)的峰峰值)
如果我們不用統(tǒng)計(jì)的方式來分析TIE抖動(dòng),而是在一個(gè)很長(zhǎng)的時(shí)間軸上來看所有的TIE抖動(dòng)值的變化趨勢(shì),即用如Lecroy示波器中的參數(shù)track的功能,我們也同樣能夠看出TIE抖動(dòng)值的變化趨勢(shì):
當(dāng)TIE的樣本積累很多時(shí),我們也能夠觀察到TIE參數(shù)變化的趨勢(shì),如下圖所示,
上圖藍(lán)色波形即為TIE抖動(dòng)參數(shù)的變化趨勢(shì),呈現(xiàn)了周期性的變化,如果對(duì)其做FFT變換,會(huì)發(fā)現(xiàn)有周期性的頻譜成分,這類抖動(dòng)就稱為周期性抖動(dòng)(Pj),如下圖所示
周期性抖動(dòng)Pj為固有抖動(dòng)Dj的一部分,除此以外,還有和數(shù)據(jù)碼型相關(guān)的抖動(dòng)DDj(數(shù)據(jù)相關(guān)性抖動(dòng));占空比失真引起的DCD抖動(dòng);因數(shù)據(jù)碼型中0電平和1電平切換頻率不同導(dǎo)致的碼間干擾抖動(dòng)ISI(因?yàn)椴煌l率的信號(hào)經(jīng)過信道時(shí)衰減延遲是不一樣的);由于高次諧波以及串?dāng)_引起的抖動(dòng),一般稱為OBUJ(其它的固有不相干抖動(dòng)),這類抖動(dòng)屬于固有抖動(dòng)成分,但是數(shù)值很小,很容易和隨機(jī)抖動(dòng)Rj混到一起,不易區(qū)分,Lecroy的NQ-SCALE方法能夠較好的區(qū)分出這類抖動(dòng)。
綜上所述,串行數(shù)據(jù)的總體抖動(dòng)Tj的構(gòu)成如下樹狀圖:
四、時(shí)鐘抖動(dòng)與數(shù)據(jù)抖動(dòng)的聯(lián)系
主要有如下幾點(diǎn):
1、數(shù)據(jù)抖動(dòng)是以TIE抖動(dòng)作為基本單位展開分析的,根據(jù)抖動(dòng)的構(gòu)成成分,將一定誤碼率情況下(特定的樣本數(shù)量)的總體抖動(dòng)Tj分解為Dj,Rj,DDj,Pj等;因?yàn)閿?shù)據(jù)信號(hào)不具備如時(shí)鐘信號(hào)一樣的周期重復(fù)性,因此數(shù)據(jù)信號(hào)沒有周期抖動(dòng)、相鄰周期間抖動(dòng)的指標(biāo)。
2、高速串行數(shù)據(jù)標(biāo)準(zhǔn)一般要求在特定誤碼率情況下(如10e-12)的總體抖動(dòng)Tj,固有抖動(dòng)Dj,隨機(jī)抖動(dòng)Rj等指標(biāo)不能過大;而時(shí)鐘信號(hào)一般是芯片手冊(cè)給出要求,因此分析時(shí)鐘抖動(dòng)時(shí)需要多大的數(shù)據(jù)量則需要引起注意,不一樣的樣本數(shù)據(jù)量,測(cè)得的抖動(dòng)結(jié)果也會(huì)偏差很大。如果時(shí)鐘手冊(cè)給出的指標(biāo)非??量?,則有可能是在1sigma范圍內(nèi)的數(shù)據(jù)量進(jìn)行測(cè)量分析的(數(shù)據(jù)量小,所以抖動(dòng)也會(huì)小很多),參照?qǐng)D4。
3、時(shí)鐘的相位抖動(dòng)、周期抖動(dòng)、相鄰周期間抖動(dòng)也同樣可以作為基本單位進(jìn)行統(tǒng)計(jì)分析,同樣也可以設(shè)定特定樣本數(shù)據(jù)時(shí)的Tj,Dj,Rj以及相關(guān)的分解(數(shù)據(jù)相關(guān)性抖動(dòng)ISI等不適用于時(shí)鐘抖動(dòng),因?yàn)闀r(shí)鐘抖動(dòng)0電平和1電平的切換率是恒定的),以便分析抖動(dòng)的來源,但是如果用數(shù)據(jù)抖動(dòng)的分析軟件來分析時(shí)鐘抖動(dòng)的話一般只能分析相位抖動(dòng),周期抖動(dòng)和相鄰周期間抖動(dòng)只能通過直方圖以及參數(shù)跟蹤的方法來分析。
4、時(shí)鐘芯片手冊(cè)或者其它芯片手冊(cè)中給出的時(shí)鐘抖動(dòng)指標(biāo)通常是某一類抖動(dòng)的峰峰值或者RMS值,也有要求總體抖動(dòng)Tj,Dj,Rj指標(biāo)的,給出這樣的指標(biāo)時(shí)我們一定得搞清楚這個(gè)指標(biāo)是對(duì)應(yīng)于多大的樣本數(shù)據(jù)量。
推薦閱讀:




